2025年赢在微点物理
注:目前有些书本章节名称可能整理的还不是很完善,但都是按照顺序排列的,请同学们按照顺序仔细查找。练习册 2025年赢在微点物理 答案主要是用来给同学们做完题方便对答案用的,请勿直接抄袭。
第64页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
- 第125页
- 第126页
- 第127页
- 第128页
- 第129页
- 第130页
- 第131页
- 第132页
- 第133页
- 第134页
- 第135页
- 第136页
- 第137页
- 第138页
- 第139页
- 第140页
- 第141页
- 第142页
- 第143页
- 第144页
- 第145页
- 第146页
- 第147页
- 第148页
- 第149页
- 第150页
- 第151页
- 第152页
- 第153页
- 第154页
- 第155页
- 第156页
- 第157页
- 第158页
- 第159页
- 第160页
- 第161页
- 第162页
- 第163页
- 第164页
- 第165页
- 第166页
- 第167页
- 第168页
- 第169页
- 第170页
- 第171页
- 第172页
- 第173页
- 第174页
- 第175页
- 第176页
- 第177页
- 第178页
- 第179页
- 第180页
- 第181页
- 第182页
- 第183页
- 第184页
- 第185页
- 第186页
- 第187页
- 第188页
- 第189页
- 第190页
- 第191页
- 第192页
- 第193页
- 第194页
- 第195页
- 第196页
- 第197页
- 第198页
- 第199页
- 第200页
- 第201页
- 第202页
- 第203页
- 第204页
- 第205页
- 第206页
- 第207页
- 第208页
- 第209页
- 第210页
- 第211页
- 第212页
- 第213页
- 第214页
- 第215页
- 第216页
- 第217页
- 第218页
- 第219页
- 第220页
- 第221页
- 第222页
- 第223页
- 第224页
- 第225页
- 第226页
- 第227页
- 第228页
- 第229页
- 第230页
- 第231页
- 第232页
3. (2023·湖北卷)某同学利用测质量的小型家用电子秤,设计了测量木块和木板间动摩擦因数$\mu$的实验。
如图甲所示,木板和木块A放在水平桌面上,电子秤放在水平地面上,木块A和放在电子秤上的重物B通过跨过定滑轮的轻绳相连。调节滑轮,使其与木块A间的轻绳水平,与重物B间的轻绳竖直。在木块A上放置$n(n = 0,1,2,3,4,5)$个砝码(电子秤称得每个砝码的质量$m_{0}$为$20.0\ g$),向左拉动木板的同时,记录电子秤的对应示数$m$。
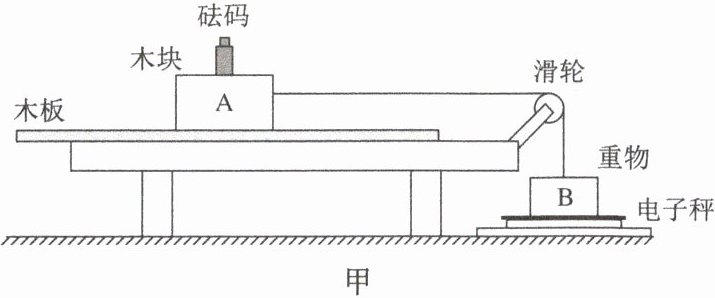
(1)实验中,拉动木板时________(填“必须”或“不必”)保持匀速。
(2)用$m_{A}$和$m_{B}$分别表示木块A和重物B的质量,则$m$和$m_{A}$、$m_{B}$、$m_{0}$、$\mu$、$n$所满足的关系式为$m =$________。
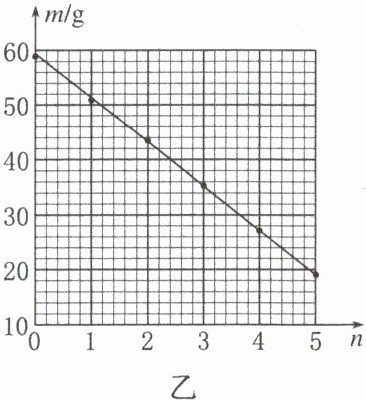
(3)根据测量数据在坐标纸上绘制出$m - n$图像,如图乙所示,可得木块A和木板间的动摩擦因数$\mu =$________(保留2位有效数字)。
如图甲所示,木板和木块A放在水平桌面上,电子秤放在水平地面上,木块A和放在电子秤上的重物B通过跨过定滑轮的轻绳相连。调节滑轮,使其与木块A间的轻绳水平,与重物B间的轻绳竖直。在木块A上放置$n(n = 0,1,2,3,4,5)$个砝码(电子秤称得每个砝码的质量$m_{0}$为$20.0\ g$),向左拉动木板的同时,记录电子秤的对应示数$m$。
(1)实验中,拉动木板时________(填“必须”或“不必”)保持匀速。
(2)用$m_{A}$和$m_{B}$分别表示木块A和重物B的质量,则$m$和$m_{A}$、$m_{B}$、$m_{0}$、$\mu$、$n$所满足的关系式为$m =$________。
(3)根据测量数据在坐标纸上绘制出$m - n$图像,如图乙所示,可得木块A和木板间的动摩擦因数$\mu =$________(保留2位有效数字)。
答案:
答案
(1)不必
(2)$m_{B} - \mu(m_{A}+nm_{0})$
(3)$0.40$
解析
(1)木块与木板间的滑动摩擦力与两者之间的相对速度无关,则实验拉动木板时不必保持匀速。
(2)对木块、砝码以及重物B分析可知$\mu(m_{A}+nm_{0})g+mg=m_{B}g$,解得$m=m_{B} - \mu(m_{A}+nm_{0})$。
(3)根据$m=m_{B}-\mu m_{A}-\mu m_{0}n$,结合题图乙可知$\mu m_{0}=\frac{59 - 19}{5}=8$,则$\mu = 0.40$。
(1)不必
(2)$m_{B} - \mu(m_{A}+nm_{0})$
(3)$0.40$
解析
(1)木块与木板间的滑动摩擦力与两者之间的相对速度无关,则实验拉动木板时不必保持匀速。
(2)对木块、砝码以及重物B分析可知$\mu(m_{A}+nm_{0})g+mg=m_{B}g$,解得$m=m_{B} - \mu(m_{A}+nm_{0})$。
(3)根据$m=m_{B}-\mu m_{A}-\mu m_{0}n$,结合题图乙可知$\mu m_{0}=\frac{59 - 19}{5}=8$,则$\mu = 0.40$。
4. 为了探究加速度与合外力之间的关系,某校研究性学习小组设计了如图甲所示的实验装置。长木板固定在水平桌面上,力传感器固定在竖直的墙上,光电计时器的光电门固定在竖直支架上,绕过动滑轮的两段绳处于水平(两滑轮光滑且滑轮和绳质量不计),悬挂的重物上固定一窄遮光条。滑块质量为$M$,重物和遮光条的总质量为$m$。现将滑块拉到某一位置,静止释放滑块,重物牵引滑块向左运动,测量并记录释放时遮光条中心到光电门之间的距离$x$以及遮光条通过光电门时的遮光时间$\Delta t$和力传感器示数$F$。多次改变重物和遮光条的质量$m$,重复上述操作,并记录多组相应的传感器示数$F$和$\Delta t$值。已知重力加速度为$g$。
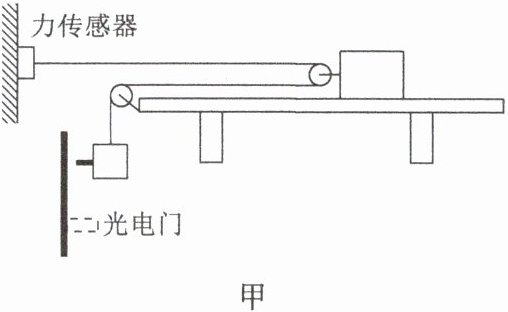
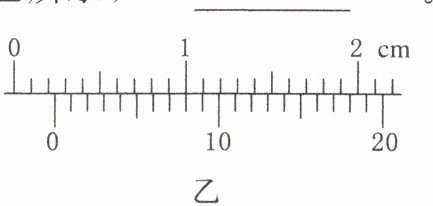
(1)用20分度的游标卡尺测量出遮光条的宽度$d$如图乙所示,$d =$________$mm$。
(2)为完成本次实验目的,________(填“需要”或“不需要”)保证重物质量$m$远远小于滑块质量$M$。
(3)平衡摩擦力时悬挂合适重物,让滑块恰好匀速直线运动,记录力传感器示数为$F_{0}$,则滑块和桌面间的摩擦力$F_{f} =$________。
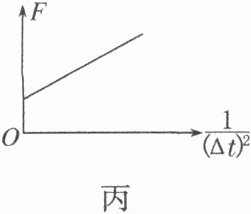
(4)改变重物和遮光条质量,多次重复实验,记录力传感器示数$F$和遮光时间$\Delta t$,以$\frac{1}{(\Delta t)^{2}}$为横坐标,以$F$为纵坐标画出图像,直线斜率为$k$,如图丙所示,则滑块质量$M =$________(用$k$,$d$,$x$表示)。
(1)用20分度的游标卡尺测量出遮光条的宽度$d$如图乙所示,$d =$________$mm$。
(2)为完成本次实验目的,________(填“需要”或“不需要”)保证重物质量$m$远远小于滑块质量$M$。
(3)平衡摩擦力时悬挂合适重物,让滑块恰好匀速直线运动,记录力传感器示数为$F_{0}$,则滑块和桌面间的摩擦力$F_{f} =$________。
(4)改变重物和遮光条质量,多次重复实验,记录力传感器示数$F$和遮光时间$\Delta t$,以$\frac{1}{(\Delta t)^{2}}$为横坐标,以$F$为纵坐标画出图像,直线斜率为$k$,如图丙所示,则滑块质量$M =$________(用$k$,$d$,$x$表示)。
答案:
答案
(1)$2.40$
(2)不需要
(3)$2F_{0}$
(4)$\frac{8kx}{d}$
解析
(1)20分度的游标卡尺的精确值为$0.05mm$,由题图中示数可得$d = 2mm + 8×0.05mm = 2.40mm$。
(2)本次实验绳子拉力可以用力传感器测得,不需要保证重物质量$m$远远小于滑块质量$M$。
(3)平衡摩擦力时悬挂合适重物,让滑块恰好匀速直线运动,记录力传感器示数为$F_{0}$,根据受力平衡可得$F_{f}=2F_{0}$。
(4)以滑块为研究对象,根据牛顿第二定律可得$2F - F_{f}=Ma$可得$a=\frac{2F - F_{f}}{M}=\frac{2F - 2F_{0}}{M}$,重物经过光电门时的速度为$v_{重}=\frac{d}{\Delta t}$可知此时滑块的速度为$v=\frac{1}{2}v_{重}=\frac{d}{2\Delta t}$,滑块的位移为$x$,对滑块,根据运动学公式可得$2ax = v^{2}-0$,联立可得$F=\frac{Md^{2}}{8x}\cdot\frac{1}{(\Delta t)^{2}}+F_{0}$,可知$F - \frac{1}{(\Delta t)^{2}}$图像的斜率为$k=\frac{Md^{2}}{8x}$,解得滑块的质量为$M=\frac{8kx}{d}$。
(1)$2.40$
(2)不需要
(3)$2F_{0}$
(4)$\frac{8kx}{d}$
解析
(1)20分度的游标卡尺的精确值为$0.05mm$,由题图中示数可得$d = 2mm + 8×0.05mm = 2.40mm$。
(2)本次实验绳子拉力可以用力传感器测得,不需要保证重物质量$m$远远小于滑块质量$M$。
(3)平衡摩擦力时悬挂合适重物,让滑块恰好匀速直线运动,记录力传感器示数为$F_{0}$,根据受力平衡可得$F_{f}=2F_{0}$。
(4)以滑块为研究对象,根据牛顿第二定律可得$2F - F_{f}=Ma$可得$a=\frac{2F - F_{f}}{M}=\frac{2F - 2F_{0}}{M}$,重物经过光电门时的速度为$v_{重}=\frac{d}{\Delta t}$可知此时滑块的速度为$v=\frac{1}{2}v_{重}=\frac{d}{2\Delta t}$,滑块的位移为$x$,对滑块,根据运动学公式可得$2ax = v^{2}-0$,联立可得$F=\frac{Md^{2}}{8x}\cdot\frac{1}{(\Delta t)^{2}}+F_{0}$,可知$F - \frac{1}{(\Delta t)^{2}}$图像的斜率为$k=\frac{Md^{2}}{8x}$,解得滑块的质量为$M=\frac{8kx}{d}$。
查看更多完整答案,请扫码查看

