第77页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
8. 在平面直角坐标系中,一个智能机器人接到的指令是:从原点O出发,按“向上→向右→向下→向右”的方向依次不断移动,每次移动1个单位长度,其移动路线如图所示,第一次移动到点$A_{1}$,第二次移动到点$A_{2}$……第n次移动到点$A_{n}$,则点$A_{2025}$的坐标是 (

A. $(1011,0)$
B. $(1011,1)$
C. $(1012,1)$
D. $(1012,0)$
C
)A. $(1011,0)$
B. $(1011,1)$
C. $(1012,1)$
D. $(1012,0)$
答案:
C
9. 如图,已知点A、B的坐标分别为$(1,2)$、$(3,0)$,将$△OAB$沿x轴向右平移,使点B平移到点E,得到$△DCE$,若$OE= 5$,则点C的坐标为____

(3,2)
.
答案:
$(3,2)$
10. 已知点M坐标为$(3a-9,-3)$,将点M向左平移3个单位长度后落在y轴上,则a的值为____
4
.
答案:
4
11. 已知点$P(0,-4),Q(6,1)$,将线段PQ平移至$P_{1}Q_{1}$,点P、Q的对应点分别为点$P_{1}$、$Q_{1}$,若$P_{1}(m,-3),Q_{1}(3,n)$,则$m-n$的值是
-5
.
答案:
$-5$
12. 对于平面直角坐标系中的任意一点$P(x,y)$,给出如下定义:点$P_{1}(x+1,2y-1)$为P的1号派生点,点$P_{2}(-y,-x)$为P的2号派生点,例如$P(2,3)$的1号派生点为$P_{1}(3,5)$,它的2号派生点为$P_{2}(-3,-2)$.
(1) 已知点$P(2,4)$,那么它的1号派生点为
(2) 若将点P向上平移1个单位长度,分别直接写出$P_{1}和P_{2}$的平移方向和距离;
(3) 已知点$P(-m,2m)$,连接它的1号派生点$P_{1}$和2号派生点$P_{2}$,若线段$P_{1}P_{2}$平行于坐标轴,求m的值.
(1) 已知点$P(2,4)$,那么它的1号派生点为
$(3,7)$
,2号派生点为$(-4,-2)$
;(2) 若将点P向上平移1个单位长度,分别直接写出$P_{1}和P_{2}$的平移方向和距离;
$P_{1}$的平移方向为向上,平移距离为2个单位,$P_{2}$的平移方向为向左,平移距离为1个单位
(3) 已知点$P(-m,2m)$,连接它的1号派生点$P_{1}$和2号派生点$P_{2}$,若线段$P_{1}P_{2}$平行于坐标轴,求m的值.
$\frac{1}{3}$或$-1$
答案:
解:
(1)
∵点$P(2,4)$,
∴它的1号派生点为$(3,7)$,2号派生点为$(-4,-2)$;
(2)将点P向上平移1个单位长度,所得点的坐标为$(x,y+1)$,
∴1号派生点$P_{1}(x+1,2y-1)$平移后的坐标为$(x+1,2(y+1)-1)$,即$(x+1,2y+1)$,2号派生点$P_{2}(-y,-x)$平移后的坐标为$(-y-1,-x)$,
∴$P_{1}$的平移方向为向上,平移距离为2个单位,$P_{2}$的平移方向为向左,平移距离为1个单位;
(3)
∵$P(-m,2m)$,
∴$P_{1}(-m+1,4m-1)$,$P_{2}(-2m,m)$,当线段$P_{1}P_{2}$平行于x轴时,$4m-1=m$,解得$m=\frac{1}{3}$;当线段$P_{1}P_{2}$平行于y轴时,$-m+1=-2m$,解得$m=-1$,综上所述,m的值为$\frac{1}{3}$或$-1$。
(1)
∵点$P(2,4)$,
∴它的1号派生点为$(3,7)$,2号派生点为$(-4,-2)$;
(2)将点P向上平移1个单位长度,所得点的坐标为$(x,y+1)$,
∴1号派生点$P_{1}(x+1,2y-1)$平移后的坐标为$(x+1,2(y+1)-1)$,即$(x+1,2y+1)$,2号派生点$P_{2}(-y,-x)$平移后的坐标为$(-y-1,-x)$,
∴$P_{1}$的平移方向为向上,平移距离为2个单位,$P_{2}$的平移方向为向左,平移距离为1个单位;
(3)
∵$P(-m,2m)$,
∴$P_{1}(-m+1,4m-1)$,$P_{2}(-2m,m)$,当线段$P_{1}P_{2}$平行于x轴时,$4m-1=m$,解得$m=\frac{1}{3}$;当线段$P_{1}P_{2}$平行于y轴时,$-m+1=-2m$,解得$m=-1$,综上所述,m的值为$\frac{1}{3}$或$-1$。
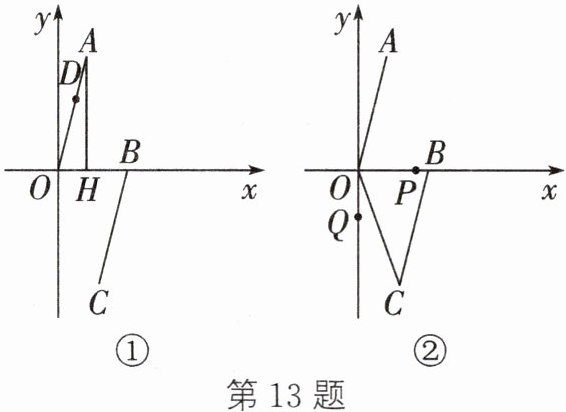
13. 如图①,点$A(1,4),AH⊥x$轴,垂足为H,将线段AO平移至线段BC,点$B(3,0)$,其中点A与点B对应,点O与点C对应.
(1)$△AOH$的面积为____
(2) 如图①,若点$D(m,n)$在线段OA上,连接DH,利用图形面积关系证明$n= 4m$;
(3) 如图②,连接OC,动点P从点B开始在x轴上以每秒2个单位长度的速度向左运动,同时点Q从点O开始在y轴上以每秒1个单位长度的速度向下运动.若经过t秒,$△AOP与△COQ$的面积相等,试求t的值及点P的坐标.
(1)$△AOH$的面积为____
2
;(2) 如图①,若点$D(m,n)$在线段OA上,连接DH,利用图形面积关系证明$n= 4m$;
(3) 如图②,连接OC,动点P从点B开始在x轴上以每秒2个单位长度的速度向左运动,同时点Q从点O开始在y轴上以每秒1个单位长度的速度向下运动.若经过t秒,$△AOP与△COQ$的面积相等,试求t的值及点P的坐标.
当点P在y轴的右侧时,$t=\frac{6}{5}$,此时$P(\frac{3}{5},0)$;当点P在y轴的左侧时,$t=2$,此时$P(-1,0)$
答案:
解:
(1)2
(2)解:连接DH,$S_{\triangle AOH}=S_{\triangle ADH}+S_{\triangle ODH}=\frac{1}{2}×1×n+\frac{1}{2}×4×(1-m)=\frac{1}{2}n+2-2m$;由
(1)知$S_{\triangle AOH}=2$,
∴$2=\frac{1}{2}n+2-2m$,
∴$n=4m$;
(3)当点P在y轴的右侧时,$\frac{1}{2}×(3-2t)×4=\frac{1}{2}×t×2$,解得,$t=\frac{6}{5}$,此时$P(\frac{3}{5},0)$,当点P在y轴的左侧时,$\frac{1}{2}×(2t-3)×4=\frac{1}{2}×t×2$,解得,$t=2$,此时$P(-1,0)$。
(1)2
(2)解:连接DH,$S_{\triangle AOH}=S_{\triangle ADH}+S_{\triangle ODH}=\frac{1}{2}×1×n+\frac{1}{2}×4×(1-m)=\frac{1}{2}n+2-2m$;由
(1)知$S_{\triangle AOH}=2$,
∴$2=\frac{1}{2}n+2-2m$,
∴$n=4m$;
(3)当点P在y轴的右侧时,$\frac{1}{2}×(3-2t)×4=\frac{1}{2}×t×2$,解得,$t=\frac{6}{5}$,此时$P(\frac{3}{5},0)$,当点P在y轴的左侧时,$\frac{1}{2}×(2t-3)×4=\frac{1}{2}×t×2$,解得,$t=2$,此时$P(-1,0)$。
查看更多完整答案,请扫码查看

