第134页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
- 第125页
- 第126页
- 第127页
- 第128页
- 第129页
- 第130页
- 第131页
- 第132页
- 第133页
- 第134页
- 第135页
- 第136页
- 第137页
- 第138页
- 第139页
- 第140页
- 第141页
- 第142页
- 第143页
- 第144页
- 第145页
- 第146页
- 第147页
- 第148页
- 第149页
- 第150页
- 第151页
- 第152页
- 第153页
- 第154页
- 第155页
- 第156页
- 第157页
- 第158页
- 第159页
- 第160页
- 第161页
- 第162页
- 第163页
- 第164页
- 第165页
- 第166页
- 第167页
- 第168页
- 第169页
- 第170页
- 第171页
- 第172页
- 第173页
- 第174页
- 第175页
- 第176页
- 第177页
- 第178页
- 第179页
- 第180页
- 第181页
- 第182页
- 第183页
- 第184页
- 第185页
- 第186页
- 第187页
- 第188页
- 第189页
- 第190页
- 第191页
- 第192页
- 第193页
- 第194页
- 第195页
- 第196页
- 第197页
- 第198页
- 第199页
- 第200页
- 第201页
- 第202页
- 第203页
- 第204页
- 第205页
- 第206页
- 第207页
- 第208页
- 第209页
- 第210页
- 第211页
- 第212页
- 第213页
- 第214页
- 第215页
- 第216页
- 第217页
- 第218页
- 第219页
- 第220页
- 第221页
- 第222页
- 第223页
- 第224页
- 第225页
- 第226页
- 第227页
- 第228页
- 第229页
- 第230页
- 第231页
- 第232页
- 第233页
- 第234页
- 第235页
- 第236页
- 第237页
- 第238页
- 第239页
- 第240页
- 第241页
- 第242页
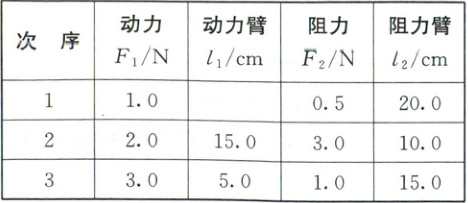
61. (2025·广元)“天宫”学习小组“探究杠杆的平衡条件”实验装置如图甲所示,每个钩码重0.5N。
(1) 调节杠杆在水平位置平衡,图乙为第一次实验的情景,则本次实验的动力臂l₁是
(2) 他们三次实验的数据如表,分析可知,杠杆的平衡条件是
(3) 如图丙所示,人的手臂是一根杠杆,由杠杆平衡条件可知,手臂是一根
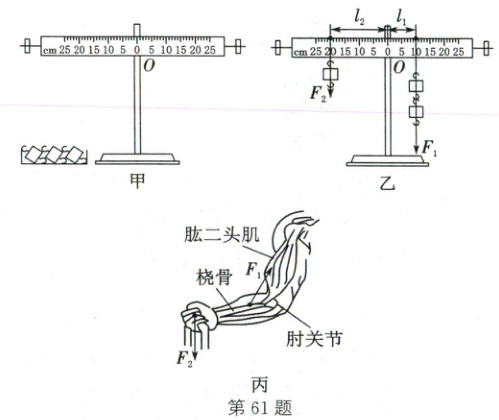
(1) 调节杠杆在水平位置平衡,图乙为第一次实验的情景,则本次实验的动力臂l₁是
10.0
cm。(2) 他们三次实验的数据如表,分析可知,杠杆的平衡条件是
F₁l₁=F₂l₂
。(用F₁、F₂、l₁、l₂表示)(3) 如图丙所示,人的手臂是一根杠杆,由杠杆平衡条件可知,手臂是一根
费力
(填“省力”“费力”或“等臂”)杠杆。
答案:
61.
(1)10.0
(2)F₁l₁=F₂l₂
(3)费力
(1)10.0
(2)F₁l₁=F₂l₂
(3)费力
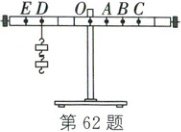
62. (2025·南通)如图所示,学习小组做“探究杠杆的平衡条件”实验。
(1) 安装好杠杆,发现左端低、右端高,应将平衡螺母向
(2) D点悬挂两个钩码,A、B、C三点分别悬挂六个、三个、两个钩码,杠杆均能在水平位置平衡,这说明杠杆平衡时,力臂越大,对应的力越
(3) 保持D点悬挂钩码不变,在E点施加力使杠杆在水平位置平衡,为了使力最小,力的方向应
(1) 安装好杠杆,发现左端低、右端高,应将平衡螺母向
右
调节,使之在水平位置平衡。(2) D点悬挂两个钩码,A、B、C三点分别悬挂六个、三个、两个钩码,杠杆均能在水平位置平衡,这说明杠杆平衡时,力臂越大,对应的力越
小
。进一步实验,可归纳得出杠杆的平衡条件是动力×动力臂=阻力×阻力臂
。(3) 保持D点悬挂钩码不变,在E点施加力使杠杆在水平位置平衡,为了使力最小,力的方向应
竖直向上(垂直杠杆向上)
,这是因为此时力臂最大
。
答案:
62.
(1)右
(2)小 动力×动力臂=阻力×阻力臂
(3)竖直向上(垂直杠杆向上) 力臂最大
(1)右
(2)小 动力×动力臂=阻力×阻力臂
(3)竖直向上(垂直杠杆向上) 力臂最大
63. (2025·广西)某实验小组做“探究杠杆的平衡条件”实验。
(1) 实验前,若杠杆静止时的位置如图甲所示,则需要将杠杆左端的螺母向
(2) 实验操作中,在杠杆两侧挂上不同数量的钩码(每个钩码所受重力均为0.5N),移动钩码位置,使杠杆重新水平平衡,如图乙所示,施加在杠杆右侧的力F₁为1.5N,读出其对应的力臂l₁为10.0cm,施加在杠杆左侧的力F₂为
(3) 改变F₁和l₁,相应调节F₂和l₂,再做几次实验,分析记录的数据得到杠杆的平衡条件是
(4) 用木棒撬动大石头时,固定支点位置后,如图丙所示,要想用较小的力撬动这块大石头,应将支点到手施力的作用线的距离
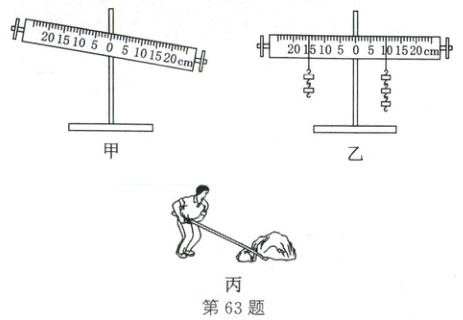
(1) 实验前,若杠杆静止时的位置如图甲所示,则需要将杠杆左端的螺母向
左
调节,使杠杆在水平位置平衡。(2) 实验操作中,在杠杆两侧挂上不同数量的钩码(每个钩码所受重力均为0.5N),移动钩码位置,使杠杆重新水平平衡,如图乙所示,施加在杠杆右侧的力F₁为1.5N,读出其对应的力臂l₁为10.0cm,施加在杠杆左侧的力F₂为
1
N,读出其对应的力臂l₂为15.0
cm。(3) 改变F₁和l₁,相应调节F₂和l₂,再做几次实验,分析记录的数据得到杠杆的平衡条件是
F₁l₁=F₂l₂
。(4) 用木棒撬动大石头时,固定支点位置后,如图丙所示,要想用较小的力撬动这块大石头,应将支点到手施力的作用线的距离
增大
(填“增大”或“减小”)。
答案:
63.
(1)左
(2)1 15.0
(3)F₁l₁=F₂l₂
(4)增大
(1)左
(2)1 15.0
(3)F₁l₁=F₂l₂
(4)增大
查看更多完整答案,请扫码查看

