2026年江苏13大市中考名卷优选38套物理
注:目前有些书本章节名称可能整理的还不是很完善,但都是按照顺序排列的,请同学们按照顺序仔细查找。练习册 2026年江苏13大市中考名卷优选38套物理 答案主要是用来给同学们做完题方便对答案用的,请勿直接抄袭。
第91页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
- 第125页
- 第126页
- 第127页
- 第128页
- 第129页
- 第130页
- 第131页
- 第132页
- 第133页
- 第134页
- 第135页
- 第136页
- 第137页
- 第138页
- 第139页
- 第140页
- 第141页
- 第142页
- 第143页
- 第144页
- 第145页
- 第146页
- 第147页
- 第148页
- 第149页
- 第150页
- 第151页
- 第152页
- 第153页
- 第154页
- 第155页
- 第156页
- 第157页
- 第158页
- 第159页
- 第160页
- 第161页
- 第162页
- 第163页
- 第164页
- 第165页
- 第166页
- 第167页
- 第168页
- 第169页
- 第170页
- 第171页
- 第172页
- 第173页
- 第174页
- 第175页
- 第176页
- 第177页
- 第178页
- 第179页
- 第180页
- 第181页
- 第182页
- 第183页
- 第184页
- 第185页
- 第186页
- 第187页
- 第188页
- 第189页
- 第190页
- 第191页
- 第192页
- 第193页
- 第194页
- 第195页
- 第196页
- 第197页
- 第198页
- 第199页
- 第200页
- 第201页
- 第202页
22 (10分)阅读短文,回答问题.
跨学科实践——制作智能垃圾箱模型
【任务要求】为保护环境、节约资源,同学们设计制作智能垃圾箱模型,实现对可回收垃圾的收集、自动称量、压缩的目的.
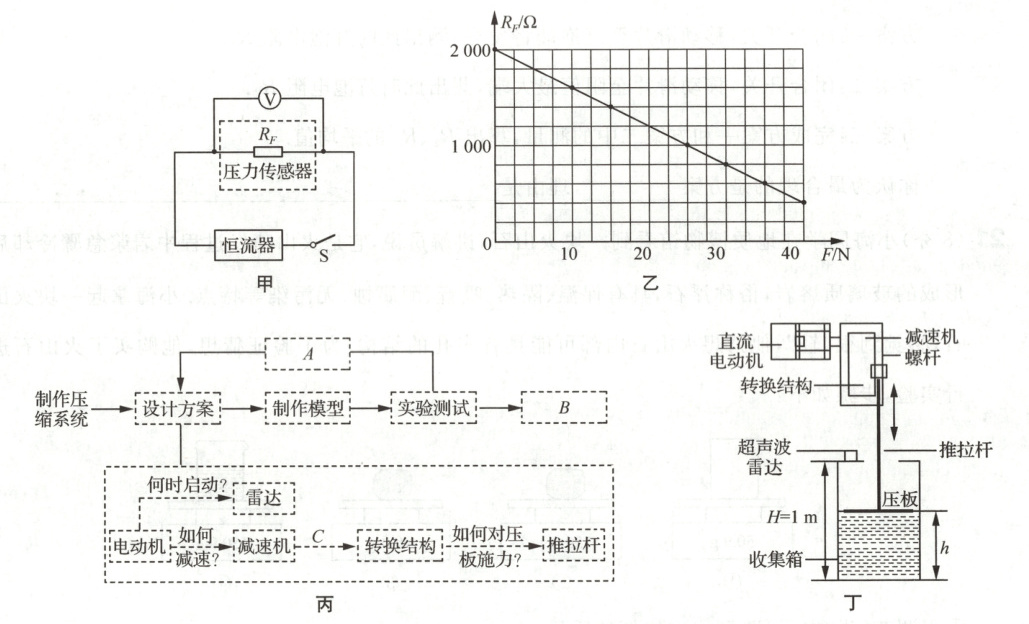
【设计制作】任务一:设计制作称重系统.图甲是称重的原理图,电源为恒流源,能始终提供大小恒定的电流,压力传感器的电阻$R_{F}$的阻值与压力的关系图像如图乙所示.某次测试中,将$1\ kg$的物体放在压力传感器上,电压表示数为$8\ V$.电压表示数能反映回收垃圾质量的大小,可在电压表上标注对应的质量值.($g$取$10\ N/kg$)
【图乙】
任务二:设计制作压缩系统.图丙是设计制作的工作流程图.
图丁为压缩系统的模型图.当雷达监测到回收物高度$h$超过预设值时,压缩系统启动,电动机通过减速机带动转换结构中的螺杆转动,螺杆将转动转化为推拉杆向下的直线运动.从而使压板在收集箱内移动.压缩系统的部分参数如下表,“导程”指螺杆每旋转一周推拉杆移动的直线距离,“减速机的速比”指电动机的转速与减速机的输出转速的比值,“电动机效率”指电动机将电能转化为机械能的效率.设电动机的输出功率等于减速机的输出转速、导程以及推拉杆的推力三者的乘积.

【交流评价】同学间交流,对模型制作过程中遇到的问题、使用效果和创新改进等方面进行评价.
(1) 雷达发射的超声波是由声源
(2) “交流评价”“反思改进”是工作流程图中的两个环节,其中环节$A$为
(3) 关于本次实践活动,下列说法正确的是
A. 压力传感器受到的压力越大,通过它的电流越大
B. 压力传感器受到的压力越大,它的阻值越大
C. 电压表刻度上标注的质量值从左向右逐渐变大
D. 当电压表示数为$6\ V$时,可回收物的质量为$2\ kg$
(4) 若预设值为$0.66H$,雷达发射至接收到超声波的时间间隔小于
(5) 实验测试完成后,同学们对模型存在的问题和需要改进的地方进行了交流.他们认为若要使模型中的称重装置测量更精确,可采取的方法是
跨学科实践——制作智能垃圾箱模型
【任务要求】为保护环境、节约资源,同学们设计制作智能垃圾箱模型,实现对可回收垃圾的收集、自动称量、压缩的目的.
【设计制作】任务一:设计制作称重系统.图甲是称重的原理图,电源为恒流源,能始终提供大小恒定的电流,压力传感器的电阻$R_{F}$的阻值与压力的关系图像如图乙所示.某次测试中,将$1\ kg$的物体放在压力传感器上,电压表示数为$8\ V$.电压表示数能反映回收垃圾质量的大小,可在电压表上标注对应的质量值.($g$取$10\ N/kg$)
【图乙】
任务二:设计制作压缩系统.图丙是设计制作的工作流程图.
图丁为压缩系统的模型图.当雷达监测到回收物高度$h$超过预设值时,压缩系统启动,电动机通过减速机带动转换结构中的螺杆转动,螺杆将转动转化为推拉杆向下的直线运动.从而使压板在收集箱内移动.压缩系统的部分参数如下表,“导程”指螺杆每旋转一周推拉杆移动的直线距离,“减速机的速比”指电动机的转速与减速机的输出转速的比值,“电动机效率”指电动机将电能转化为机械能的效率.设电动机的输出功率等于减速机的输出转速、导程以及推拉杆的推力三者的乘积.
【交流评价】同学间交流,对模型制作过程中遇到的问题、使用效果和创新改进等方面进行评价.
(1) 雷达发射的超声波是由声源
振动
产生的,改变电动机中的电流
方向可改变压板运动的方向.(2) “交流评价”“反思改进”是工作流程图中的两个环节,其中环节$A$为
反思改进
;$C$处提出的问题是如何将转动变为直线运动
.(3) 关于本次实践活动,下列说法正确的是
D
.A. 压力传感器受到的压力越大,通过它的电流越大
B. 压力传感器受到的压力越大,它的阻值越大
C. 电压表刻度上标注的质量值从左向右逐渐变大
D. 当电压表示数为$6\ V$时,可回收物的质量为$2\ kg$
(4) 若预设值为$0.66H$,雷达发射至接收到超声波的时间间隔小于
$2 × 10^{-3}$
$ s$时,电动机启动.电动机以额定功率工作时,压板与回收物的接触面积为$800\ cm^{2}$,则压板对回收物的压强为$2 × 10^{4}$
$ Pa$.(超声波在空气中的速度取$340\ m/s$)(5) 实验测试完成后,同学们对模型存在的问题和需要改进的地方进行了交流.他们认为若要使模型中的称重装置测量更精确,可采取的方法是
增大恒流源电流或更换随压力变化更灵敏的传感器
;请对模型的设计再提出一个改进的建议或创新方法:答案一:利用太阳能发电系统,为模型提供电力需求(节能环保类)
答案二:设置保护开关,保证电动机功率保持在安全范围,不至于烧毁(安全用电类) 答案三:设计垃圾桶侧面投送窗口,保证垃圾不受压板阻挡(设计工艺类) 答案四:利用红外装置等,设计自动识别可回收物的种类;利用人工智能,将回收物的质量转化为积分奖励学生等.(智能创新类)(其他合理答案均给分)
.答案二:设置保护开关,保证电动机功率保持在安全范围,不至于烧毁(安全用电类) 答案三:设计垃圾桶侧面投送窗口,保证垃圾不受压板阻挡(设计工艺类) 答案四:利用红外装置等,设计自动识别可回收物的种类;利用人工智能,将回收物的质量转化为积分奖励学生等.(智能创新类)(其他合理答案均给分)
答案:
22(除特殊标注外,每空1分)
(1)振动 电流
(2)反思改进 如何将转动变为直线运动
(3)D (2分)
(4)$2 × 10^{-3}$ $2 × 10^{4}$
(5)增大恒流源电流或更换随压力变化更灵敏的传感器 答案一:利用太阳能发电系统,为模型提供电力需求(节能环保类)
答案二:设置保护开关,保证电动机功率保持在安全范围,不至于烧毁(安全用电类) 答案三:设计垃圾桶侧面投送窗口,保证垃圾不受压板阻挡(设计工艺类) 答案四:利用红外装置等,设计自动识别可回收物的种类;利用人工智能,将回收物的质量转化为积分奖励学生等.(智能创新类)(其他合理答案均给分)
解析:
(1)雷达发射的超声波是由振动体振动产生的,电动机转向与电流方向有关,改变电流方向可以改变转向而改变压板运动的方向。
(2)根据工作流程图的一般流程,先进行“交流评价”,再根据评价结果进行“反思改进”,所以环节A为反思改进。C处是在交流评价环节,结合“对模型制作过程中遇到的问题、使用效果和创新改进等方面进行评价”可知,C处提出的问题是如何将转动变为直线运动等。
(3)电源为恒流源,通过压力传感器的电流不变,故A错误;由压力传感器的电阻的阻值与压力的关系图线可知,压力越大,阻值越小,故B错误;压力越大,电阻越小,电流不变,根据$U = IR$知,电压表示数越小,而压力越大,垃圾质量越大,所以电压表刻度上标注的质量值从左向右逐渐变小,C错误;将$1kg$的物体放在压力传感器上,电阻为$1600\Omega$,电压表示数为$8V$,电流$I = \frac{U}{R} = \frac{8V}{1600\Omega} = 0.005A$保持不变,当电压表示数为$6V$时,$R' = \frac{U'}{I} = \frac{6V}{0.005A} = 1200\Omega$;根据图象知,此时的压力为$20N$,$G = F = 20N$,质量为$m = \frac{G}{g} = \frac{20N}{10N/kg} = 2kg$,故D正确。
(4)当雷达监测到回收物高度超过预设值时,压缩系统启动,电动机通过减速机带动转换结构中的螺杆转动,螺杆将转动转化为推拉杆向下的直线运动。所以若预设值为$0.66H$,则超声波传播的距离为$s = 2 × (H - 0.66H) = 0.68H = 0.68 × 1m = 0.68m$,已知$v = 340m/s$,则超声波传播的时间间隔$t = \frac{s}{v} = \frac{0.68m}{340m/s} = 2 × 10^{-3}s$,所以若预设值为$0.66H$,雷达发射至接收到超声波的时间间隔小于$0.002s$时,电动机启动。电动机额定功率$P = 60W$,电动机效率$\eta = 90\%$,则电动机输出功率$P_{出} = P × 90\% = 60 × 90\% = 54W$。减速机的输出转速$n = \frac{电动机的额定转速}{减速机的速比} = \frac{60}{20}r/s = 3r/s$,根据$P_{出} = n × l × F$($l$为导程),可得推拉杆的推力$F = \frac{P_{出}}{n × l} = \frac{54}{3 × 1.2 × 10^{-2}}N = 1500N$。
压板的重力$G = mg = 10kg × 10N/kg = 100N$,压板对回收物的压力$F_{压} = F + G = 1500N + 100N = 1600N$,接触面积$S = 800cm^{2} = 0.08m^{2}$,根据$p = \frac{F_{压}}{S}$,可得压强$p = \frac{1600}{0.08}Pa = 2 × 10^{4}Pa$。
(5)若要使模型中的称重装置测量更精确,压力一定时电阻一定,故可以增大恒定的电流;对模型的设计提出的改进措施是:答案一:利用太阳能发电系统,为模型提供电力需求;(节能环保类) 答案二:设置保护开关,保证电动机功率保持在安全范围,不至于烧毁;(安全用电类) 答案三:设计垃圾桶侧面投送窗口,保证垃圾不受压板阻挡;(设计工艺类) 答案四:利用红外装置等,设计自动识别可回收物的种类;利用人工智能,将回收物的质量转化为积分奖励学生等.(智能创新类)(其他合理答案均给分)
Plus思路分析
本题考查信息获取与压强和速度公式的应用以及欧姆定律的应用,属于难题。
(1)声波是由振动体振动产生的,电动机转向与电流方向有关;
(2)根据探究的步骤分析解得;
(3)电源为恒流源,通过压力传感器的电流不变,结合欧姆定律分析解答;
(4)根据速度公式分析解答;根据功率$P_{出} = n × l × F$计算推拉杆推力,进一步得出压力,结合压强公式解答;
(5)根据电压$U = IR$分析。
(1)振动 电流
(2)反思改进 如何将转动变为直线运动
(3)D (2分)
(4)$2 × 10^{-3}$ $2 × 10^{4}$
(5)增大恒流源电流或更换随压力变化更灵敏的传感器 答案一:利用太阳能发电系统,为模型提供电力需求(节能环保类)
答案二:设置保护开关,保证电动机功率保持在安全范围,不至于烧毁(安全用电类) 答案三:设计垃圾桶侧面投送窗口,保证垃圾不受压板阻挡(设计工艺类) 答案四:利用红外装置等,设计自动识别可回收物的种类;利用人工智能,将回收物的质量转化为积分奖励学生等.(智能创新类)(其他合理答案均给分)
解析:
(1)雷达发射的超声波是由振动体振动产生的,电动机转向与电流方向有关,改变电流方向可以改变转向而改变压板运动的方向。
(2)根据工作流程图的一般流程,先进行“交流评价”,再根据评价结果进行“反思改进”,所以环节A为反思改进。C处是在交流评价环节,结合“对模型制作过程中遇到的问题、使用效果和创新改进等方面进行评价”可知,C处提出的问题是如何将转动变为直线运动等。
(3)电源为恒流源,通过压力传感器的电流不变,故A错误;由压力传感器的电阻的阻值与压力的关系图线可知,压力越大,阻值越小,故B错误;压力越大,电阻越小,电流不变,根据$U = IR$知,电压表示数越小,而压力越大,垃圾质量越大,所以电压表刻度上标注的质量值从左向右逐渐变小,C错误;将$1kg$的物体放在压力传感器上,电阻为$1600\Omega$,电压表示数为$8V$,电流$I = \frac{U}{R} = \frac{8V}{1600\Omega} = 0.005A$保持不变,当电压表示数为$6V$时,$R' = \frac{U'}{I} = \frac{6V}{0.005A} = 1200\Omega$;根据图象知,此时的压力为$20N$,$G = F = 20N$,质量为$m = \frac{G}{g} = \frac{20N}{10N/kg} = 2kg$,故D正确。
(4)当雷达监测到回收物高度超过预设值时,压缩系统启动,电动机通过减速机带动转换结构中的螺杆转动,螺杆将转动转化为推拉杆向下的直线运动。所以若预设值为$0.66H$,则超声波传播的距离为$s = 2 × (H - 0.66H) = 0.68H = 0.68 × 1m = 0.68m$,已知$v = 340m/s$,则超声波传播的时间间隔$t = \frac{s}{v} = \frac{0.68m}{340m/s} = 2 × 10^{-3}s$,所以若预设值为$0.66H$,雷达发射至接收到超声波的时间间隔小于$0.002s$时,电动机启动。电动机额定功率$P = 60W$,电动机效率$\eta = 90\%$,则电动机输出功率$P_{出} = P × 90\% = 60 × 90\% = 54W$。减速机的输出转速$n = \frac{电动机的额定转速}{减速机的速比} = \frac{60}{20}r/s = 3r/s$,根据$P_{出} = n × l × F$($l$为导程),可得推拉杆的推力$F = \frac{P_{出}}{n × l} = \frac{54}{3 × 1.2 × 10^{-2}}N = 1500N$。
压板的重力$G = mg = 10kg × 10N/kg = 100N$,压板对回收物的压力$F_{压} = F + G = 1500N + 100N = 1600N$,接触面积$S = 800cm^{2} = 0.08m^{2}$,根据$p = \frac{F_{压}}{S}$,可得压强$p = \frac{1600}{0.08}Pa = 2 × 10^{4}Pa$。
(5)若要使模型中的称重装置测量更精确,压力一定时电阻一定,故可以增大恒定的电流;对模型的设计提出的改进措施是:答案一:利用太阳能发电系统,为模型提供电力需求;(节能环保类) 答案二:设置保护开关,保证电动机功率保持在安全范围,不至于烧毁;(安全用电类) 答案三:设计垃圾桶侧面投送窗口,保证垃圾不受压板阻挡;(设计工艺类) 答案四:利用红外装置等,设计自动识别可回收物的种类;利用人工智能,将回收物的质量转化为积分奖励学生等.(智能创新类)(其他合理答案均给分)
Plus思路分析
本题考查信息获取与压强和速度公式的应用以及欧姆定律的应用,属于难题。
(1)声波是由振动体振动产生的,电动机转向与电流方向有关;
(2)根据探究的步骤分析解得;
(3)电源为恒流源,通过压力传感器的电流不变,结合欧姆定律分析解答;
(4)根据速度公式分析解答;根据功率$P_{出} = n × l × F$计算推拉杆推力,进一步得出压力,结合压强公式解答;
(5)根据电压$U = IR$分析。
查看更多完整答案,请扫码查看

