2026年江苏13大市中考名卷优选38套物理
注:目前有些书本章节名称可能整理的还不是很完善,但都是按照顺序排列的,请同学们按照顺序仔细查找。练习册 2026年江苏13大市中考名卷优选38套物理 答案主要是用来给同学们做完题方便对答案用的,请勿直接抄袭。
第51页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
- 第125页
- 第126页
- 第127页
- 第128页
- 第129页
- 第130页
- 第131页
- 第132页
- 第133页
- 第134页
- 第135页
- 第136页
- 第137页
- 第138页
- 第139页
- 第140页
- 第141页
- 第142页
- 第143页
- 第144页
- 第145页
- 第146页
- 第147页
- 第148页
- 第149页
- 第150页
- 第151页
- 第152页
- 第153页
- 第154页
- 第155页
- 第156页
- 第157页
- 第158页
- 第159页
- 第160页
- 第161页
- 第162页
- 第163页
- 第164页
- 第165页
- 第166页
- 第167页
- 第168页
- 第169页
- 第170页
- 第171页
- 第172页
- 第173页
- 第174页
- 第175页
- 第176页
- 第177页
- 第178页
- 第179页
- 第180页
- 第181页
- 第182页
- 第183页
- 第184页
- 第185页
- 第186页
- 第187页
- 第188页
- 第189页
- 第190页
- 第191页
- 第192页
- 第193页
- 第194页
- 第195页
- 第196页
- 第197页
- 第198页
- 第199页
- 第200页
- 第201页
- 第202页
14 在研究电磁感应现象活动中.

(1) 摇动发电机模型的手柄,灯泡发光,是因为线圈在
(2) 如图所示,导体$AB$静止,闭合开关,灵敏电流计指针
(1) 摇动发电机模型的手柄,灯泡发光,是因为线圈在
磁场
中转动,产生感应电流,把机械
能转化为电能.(2) 如图所示,导体$AB$静止,闭合开关,灵敏电流计指针
不偏转
;再让导体$AB$水平向右运动,灵敏电流计指针偏转
.(均填“偏转”或“不偏转”)
答案:
14(1)磁场 机械 (2)不偏转 偏转
解析:(1)摇动发电机模型的手柄,灯泡发光,是因为线圈在磁场中转动,产生感应电流,此过程中,消耗机械能,把机械能转化为电能。
(2)如图,导体AB静止,闭合开关,灵敏电流计指针不偏转;再让导体AB水平向右运动,则导体切割磁感应线,产生感应电流,灵敏电流计指针偏转。
解析:(1)摇动发电机模型的手柄,灯泡发光,是因为线圈在磁场中转动,产生感应电流,此过程中,消耗机械能,把机械能转化为电能。
(2)如图,导体AB静止,闭合开关,灵敏电流计指针不偏转;再让导体AB水平向右运动,则导体切割磁感应线,产生感应电流,灵敏电流计指针偏转。
15 用乒乓球做小实验.
(1) 如图甲所示,乒乓球接触到正在发声的音叉时,会被弹起,说明发声体在
(2) 如图乙所示,用吸管吹气,两乒乓球向中间靠拢,这是因为两球中间气体流速大,气体压强

(1) 如图甲所示,乒乓球接触到正在发声的音叉时,会被弹起,说明发声体在
振动
.乒乓球在该实验中所起的作用是将音叉的微小振动放大
.(2) 如图乙所示,用吸管吹气,两乒乓球向中间靠拢,这是因为两球中间气体流速大,气体压强
小
.
答案:
15(1)振动 将音叉的微小振动放大 (2)小
解析:(1)由实验现象可知,敲击音叉,乒乓球被弹起,说明发声体在振动,声音是由物体的振动产生的,乒乓球在实验中所起的作用是将音叉的微小振动放大。
(2)用一支吸管对着两个乒乓球中间吹气,会观察到两个乒乓球靠近,这是因为流体流速大的位置压强小,乒乓球中间的压强小于两侧的压强,在内外气压差的作用下靠近。
解析:(1)由实验现象可知,敲击音叉,乒乓球被弹起,说明发声体在振动,声音是由物体的振动产生的,乒乓球在实验中所起的作用是将音叉的微小振动放大。
(2)用一支吸管对着两个乒乓球中间吹气,会观察到两个乒乓球靠近,这是因为流体流速大的位置压强小,乒乓球中间的压强小于两侧的压强,在内外气压差的作用下靠近。
16 如图所示是《天工开物》记载的我国古人磨面的场景.水从高处流下来,
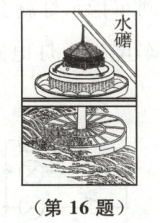
重力势
能转化为动
能,冲击水轮机带动石磨转动.石磨接触面粗糙,是为了增大摩擦力
.
答案:
16 重力势 动 摩擦力
解析:高处的水具有重力势能,流下时高度降低,速度增大,重力势能转化为动能。石磨接触面粗糙是通过增加接触面的粗糙程度来增大摩擦力,摩擦力越大,谷物在石磨间的研磨效果越好,避免打滑。
解析:高处的水具有重力势能,流下时高度降低,速度增大,重力势能转化为动能。石磨接触面粗糙是通过增加接触面的粗糙程度来增大摩擦力,摩擦力越大,谷物在石磨间的研磨效果越好,避免打滑。
17 如图所示,测电笔的氖管发光,所测孔连接的是
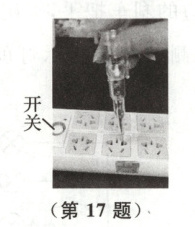
火
线.多个用电器同时插入插线板都能独立工作,各用电器是并
联的.断开插线板上的开关,所有插孔都不能供电,表明开关连接在干
路上.三孔插座中间的插孔接地,将用电器的金属外壳
与大地相连,目的是防止触电.
答案:
17 火 并 干 金属外壳
解析:测电笔的氖管发光,所测孔连接的是火线;多个用电器同时插入插线板都能独立工作,互不影响,说明各用电器是并联的;开关与控制的电路串联,断开插线板上的开关,所有插孔都不能供电,表明开关连接在干路上;三孔插座中间的插孔接地,将三脚插头插入三孔插座中,则将用电器的金属外壳与大地相连,目的是防止触电。
解析:测电笔的氖管发光,所测孔连接的是火线;多个用电器同时插入插线板都能独立工作,互不影响,说明各用电器是并联的;开关与控制的电路串联,断开插线板上的开关,所有插孔都不能供电,表明开关连接在干路上;三孔插座中间的插孔接地,将三脚插头插入三孔插座中,则将用电器的金属外壳与大地相连,目的是防止触电。
18 如图所示是兄弟二人抬水的场景.扁担相当于杠杆,若以哥哥的肩为支点,弟弟对扁担的作用力是动力,哥哥将水桶悬挂点向自己移动一段距离,动力臂

不变
,阻力臂变小
,弟弟对扁担的作用力变小
.(均填变化情况)
答案:
18 不变 变小 变小
解析:哥哥将水桶悬挂点向自己移动一段距离,哥哥的肩(支点)到弟弟的垂直距离没变,故动力臂不变,但是水桶离哥哥的垂直距离变小了,故阻力臂变小;根据杠杆平衡条件可知,动力臂不变,阻力臂变小,阻力不变时,动力要变小,故弟弟对扁担的作用力变小。
解析:哥哥将水桶悬挂点向自己移动一段距离,哥哥的肩(支点)到弟弟的垂直距离没变,故动力臂不变,但是水桶离哥哥的垂直距离变小了,故阻力臂变小;根据杠杆平衡条件可知,动力臂不变,阻力臂变小,阻力不变时,动力要变小,故弟弟对扁担的作用力变小。
19 如图所示,某款人形机器人参加半程马拉松比赛,安装在腹部的摄像头相当于一个

凸
透镜,远处的物体成倒立、缩小
的实像.该机器人跑步由电动机驱动,电动机的工作原理是磁场对通电导体
有力的作用.以并肩运动的陪跑员为参照物,机器人是静止
的.机器人跑完21 km路程用时约为2 h 40 min,平均速度约为8
$ km/h$(结果保留整数).
答案:
19 凸 缩小 通电导体 静止 8
解析:摄像头相当于一个凸透镜,成倒立、缩小的实像;电动机的工作原理是磁场对通电导体有力的作用;以并肩运动的陪跑员为参照物,机器人是静止的;机器人跑完21km用时约为2h40min,平均速度约为$v = \frac{s}{t} = \frac{21km}{2h40min} ≈ 8km/h。$
解析:摄像头相当于一个凸透镜,成倒立、缩小的实像;电动机的工作原理是磁场对通电导体有力的作用;以并肩运动的陪跑员为参照物,机器人是静止的;机器人跑完21km用时约为2h40min,平均速度约为$v = \frac{s}{t} = \frac{21km}{2h40min} ≈ 8km/h。$
查看更多完整答案,请扫码查看

