2025年学霸高考黑题物理人教版
注:目前有些书本章节名称可能整理的还不是很完善,但都是按照顺序排列的,请同学们按照顺序仔细查找。练习册 2025年学霸高考黑题物理人教版 答案主要是用来给同学们做完题方便对答案用的,请勿直接抄袭。
第67页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
- 第125页
- 第126页
- 第127页
- 第128页
- 第129页
- 第130页
- 第131页
- 第132页
- 第133页
- 第134页
- 第135页
- 第136页
- 第137页
- 第138页
- 第139页
- 第140页
- 第141页
- 第142页
- 第143页
- 第144页
- 第145页
- 第146页
- 第147页
- 第148页
- 第149页
- 第150页
- 第151页
压轴挑战 4 多个人船模型+斜抛运动
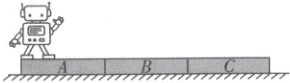
(2024·河北卷)如图,三块厚度相同、质量相等的木板 $ A $、$ B $、$ C $ (上表面均粗糙)并排静止在光滑水平面上,尺寸不计的智能机器人静止于 $ A $ 木板左端.已知三块木板质量均为 $ 2.0 \, kg $,$ A $ 木板长度为 $ 2.0 \, m $,机器人质量为 $ 6.0 \, kg $,重力加速度 $ g $ 取 $ 10 \, m/s^2 $,忽略空气阻力.
(1)机器人从 $ A $ 木板左端走到 $ A $ 木板右端时,求 $ A $、$ B $ 木板间的水平距离;
(2)机器人走到 $ A $ 木板右端相对木板静止后,以做功最少的方式从 $ A $ 木板右端跳到 $ B $ 木板左端,求起跳过程机器人做的功,及跳离瞬间的速度方向与水平方向夹角的正切值;
(3)若机器人以做功最少的方式跳到 $ B $ 木板左端后立刻与 $ B $ 木板相对静止,随即相对 $ B $ 木板连续不停地 $ 3 $ 次等间距跳到 $ B $ 木板右端,此时 $ B $ 木板恰好追上 $ A $ 木板.求该时刻 $ A $、$ C $ 两木板间距 $ x_{AC} $ 与 $ B $ 木板长度 $ L_B $ 的关系.
(2024·河北卷)如图,三块厚度相同、质量相等的木板 $ A $、$ B $、$ C $ (上表面均粗糙)并排静止在光滑水平面上,尺寸不计的智能机器人静止于 $ A $ 木板左端.已知三块木板质量均为 $ 2.0 \, kg $,$ A $ 木板长度为 $ 2.0 \, m $,机器人质量为 $ 6.0 \, kg $,重力加速度 $ g $ 取 $ 10 \, m/s^2 $,忽略空气阻力.
(1)机器人从 $ A $ 木板左端走到 $ A $ 木板右端时,求 $ A $、$ B $ 木板间的水平距离;
(2)机器人走到 $ A $ 木板右端相对木板静止后,以做功最少的方式从 $ A $ 木板右端跳到 $ B $ 木板左端,求起跳过程机器人做的功,及跳离瞬间的速度方向与水平方向夹角的正切值;
(3)若机器人以做功最少的方式跳到 $ B $ 木板左端后立刻与 $ B $ 木板相对静止,随即相对 $ B $ 木板连续不停地 $ 3 $ 次等间距跳到 $ B $ 木板右端,此时 $ B $ 木板恰好追上 $ A $ 木板.求该时刻 $ A $、$ C $ 两木板间距 $ x_{AC} $ 与 $ B $ 木板长度 $ L_B $ 的关系.
答案:
4.题型分析
本题涉及两个人船模型,在$A$板上是无初速度的人船模型,在$B$板上是有初速度的人船模型。
(1)$1.5 m$
(2)$90 J$
(3)$x_{AC} = \frac{7}{4}L_B$
解析:
(1)机器人从$A$木板左端走到$A$木板右端,机器人与$A$木板组成的系统动量守恒,设机器人质量为$M$,木板质量为$m$,在任意时刻,根据动量守恒有$Mv = mv_{A1}$。
取运动过程中每一段极短的时间$\Delta t$,则有$\sum Mv\Delta t = \sum mv_{A1}\Delta t$。
即$Mx = mx_{A1}$。
同时有$x + x_{A1} = L_A$,解得$A$、$B$木板间的水平距离$x_{A1} = \frac{3}{4}L_A = 1.5 m$。
(2)设机器人起跳的水平速度为$v_x$,竖直速度为$v_y$,起跳速度方向与水平方向的夹角为$\theta$,从$A$木板右端跳到$B$木板左端时间为$t$。
名师点评:做第
(2)问时,不需要考虑第
(1)问所设的$v_{A1}$,因为动量守恒是普适的,在起跳这一刻满足动量守恒,与之前的过程中机器人是走、跑或者跳都无关。
根据斜抛运动规律,水平方向有$v_xt = x_{A1}$,竖直方向有$2\frac{v_y}{g} = t$。
联立可得$v_y = \frac{15}{2v_x}$。
根据动量守恒有$Mv_x = mv_{A2}$。
根据功能关系可得机器人做功为$W = \frac{1}{2}M(v_x^2 + v_y^2) + \frac{1}{2}mv_{A2}^2 = \frac{675}{4v_x^2} + 12v_x^2 \geqslant 90 J$。
由不等式知识可得,当且仅当$\frac{675}{4v_x^2} = 12v_x^2$,即$v_x = \frac{\sqrt{15}}{2} m/s$时取等号。
此时$v_y = \sqrt{15} m/s$,则$\tan\theta = \frac{v_y}{v_x} = 2$,此时$v_{A2} = \frac{3\sqrt{15}}{2} m/s$。
综上,起跳过程中机器人做功的最小值为$90 J$,起跳瞬间速度与水平方向夹角的正切值为$2$。
名师点评:也可设起跳速度为$v$,分解斜抛运动可得$v\cos\theta· t = x_{A1}$,$2\frac{v\sin\theta}{g} = t$,联立解得$v^2 = \frac{45}{2\sin\theta\cos\theta}$,由动量守恒有$Mv\cos\theta = mv_{A2}$,代入机器人做功$W = \frac{1}{2}Mv^2 + \frac{1}{2}mv_{A2}^2 = \frac{45 + 135\cos^2\theta}{2\sin\theta\cos\theta} J = \frac{(1 + 3\cos^2\theta)·45 J}{2\sin\theta\cos\theta} = \frac{\sin^2\theta + 4\cos^2\theta}{2\sin\theta\cos\theta}·45 J = (\frac{\tan\theta}{2} + \frac{2}{\tan\theta})·45 J \geqslant 2·\frac{\tan\theta}{2}·\frac{2}{\tan\theta}·45 J = 90 J$,根据不等式知识可得当$\frac{\tan\theta}{2} = \frac{2}{\tan\theta}$时,即$\tan\theta = 2$时,$W$取最小值。
(3)由
(2)可得,$A$木板在机器人跳离后以速度$v_{A2}$向左匀速运动,机器人跳上$B$木板的瞬间,机器人与$BC$木板组成的系统在水平方向动量守恒,得$Mv_x = (M + 2m)v_{共}$,$C$木板此后以速度$v_{共}$向右匀速运动。
该过程$A$木板向左运动的距离为$x_{A2} = v_{A2}t' = v_{A2}\frac{2v_y}{g} = 4.5 m$。
机器人连续$3$次等间距跳到$B$木板右端,整个过程机器人和$B$木板组成的系统水平方向动量守恒,设每次起跳机器人的水平速度大小为$v_0$,$B$木板的速度大小为$v_B$,机器人$3$次跳跃的总时间为$t_1$,取向右为正方向,如图所示。

由动量守恒得$(M + m)v_{共} = Mv_0 - mv_B·s①$。
机器人和$B$木板的相对位移为$B$木板长度$L_B$,得$(v_0 + v_B)t_1 = L_B·s②$。
机器人到$B$木板右端时,$B$木板恰好追上$A$木板,得$x_B - x_{A3} = x_{A1} + x_{A2}$,即$(v_B - v_{A2})t_1 = 6 m·s③$。
联立①②③解得$t_1 = \frac{3L_B}{4(v_{A2} + v_{共})}$。
故$A$、$C$两木板间距为$x_{AC} = v_{A2}t_1 + 6 + L_B + v_{共}t_1 = (v_{A2} + v_{共})t_1 + 6 + L_B$,解得$x_{AC} = \frac{7}{4}L_B$。
解题技巧:本题的难点在于机器人与$B$木板组成的是有初速度的人船模型,但可以采取一些方法规避这个初速度。
①取$C$木板为参考系($C$木板做匀速运动,为惯性参考系),则$C$木板不动,$A$木板以大小为$(v_{A2} + v_{共})$的速度向左运动,机器人与$B$木板为无初速的人船模型,如下图所示,满足$Mx = mx$,$x + x = L_B$,解得$x = \frac{3}{4}L_B$,则有$x_{AC} = x + L_B = \frac{7}{4}L_B$。
②将机器人和$B$木板的运动视为整体以$v_{共}$的速度的向右匀速运动模型与人船模型,根据人船模型结论可得$Mx = mx$,$x + x = L_B$,解得$x = \frac{3}{4}L_B$,则$B$木板的实际位移$x = x - v_{共}t = \frac{3}{4}L_B - v_{共}t$,方向向左,则$x_{AC} = x + L_B + x_C = \frac{3}{4}L_B - v_{共}t + L_B + v_{共}t = \frac{7}{4}L_B$。
4.题型分析
本题涉及两个人船模型,在$A$板上是无初速度的人船模型,在$B$板上是有初速度的人船模型。
(1)$1.5 m$
(2)$90 J$
(3)$x_{AC} = \frac{7}{4}L_B$
解析:
(1)机器人从$A$木板左端走到$A$木板右端,机器人与$A$木板组成的系统动量守恒,设机器人质量为$M$,木板质量为$m$,在任意时刻,根据动量守恒有$Mv = mv_{A1}$。
取运动过程中每一段极短的时间$\Delta t$,则有$\sum Mv\Delta t = \sum mv_{A1}\Delta t$。
即$Mx = mx_{A1}$。
同时有$x + x_{A1} = L_A$,解得$A$、$B$木板间的水平距离$x_{A1} = \frac{3}{4}L_A = 1.5 m$。
(2)设机器人起跳的水平速度为$v_x$,竖直速度为$v_y$,起跳速度方向与水平方向的夹角为$\theta$,从$A$木板右端跳到$B$木板左端时间为$t$。
名师点评:做第
(2)问时,不需要考虑第
(1)问所设的$v_{A1}$,因为动量守恒是普适的,在起跳这一刻满足动量守恒,与之前的过程中机器人是走、跑或者跳都无关。
根据斜抛运动规律,水平方向有$v_xt = x_{A1}$,竖直方向有$2\frac{v_y}{g} = t$。
联立可得$v_y = \frac{15}{2v_x}$。
根据动量守恒有$Mv_x = mv_{A2}$。
根据功能关系可得机器人做功为$W = \frac{1}{2}M(v_x^2 + v_y^2) + \frac{1}{2}mv_{A2}^2 = \frac{675}{4v_x^2} + 12v_x^2 \geqslant 90 J$。
由不等式知识可得,当且仅当$\frac{675}{4v_x^2} = 12v_x^2$,即$v_x = \frac{\sqrt{15}}{2} m/s$时取等号。
此时$v_y = \sqrt{15} m/s$,则$\tan\theta = \frac{v_y}{v_x} = 2$,此时$v_{A2} = \frac{3\sqrt{15}}{2} m/s$。
综上,起跳过程中机器人做功的最小值为$90 J$,起跳瞬间速度与水平方向夹角的正切值为$2$。
名师点评:也可设起跳速度为$v$,分解斜抛运动可得$v\cos\theta· t = x_{A1}$,$2\frac{v\sin\theta}{g} = t$,联立解得$v^2 = \frac{45}{2\sin\theta\cos\theta}$,由动量守恒有$Mv\cos\theta = mv_{A2}$,代入机器人做功$W = \frac{1}{2}Mv^2 + \frac{1}{2}mv_{A2}^2 = \frac{45 + 135\cos^2\theta}{2\sin\theta\cos\theta} J = \frac{(1 + 3\cos^2\theta)·45 J}{2\sin\theta\cos\theta} = \frac{\sin^2\theta + 4\cos^2\theta}{2\sin\theta\cos\theta}·45 J = (\frac{\tan\theta}{2} + \frac{2}{\tan\theta})·45 J \geqslant 2·\frac{\tan\theta}{2}·\frac{2}{\tan\theta}·45 J = 90 J$,根据不等式知识可得当$\frac{\tan\theta}{2} = \frac{2}{\tan\theta}$时,即$\tan\theta = 2$时,$W$取最小值。
(3)由
(2)可得,$A$木板在机器人跳离后以速度$v_{A2}$向左匀速运动,机器人跳上$B$木板的瞬间,机器人与$BC$木板组成的系统在水平方向动量守恒,得$Mv_x = (M + 2m)v_{共}$,$C$木板此后以速度$v_{共}$向右匀速运动。
该过程$A$木板向左运动的距离为$x_{A2} = v_{A2}t' = v_{A2}\frac{2v_y}{g} = 4.5 m$。
机器人连续$3$次等间距跳到$B$木板右端,整个过程机器人和$B$木板组成的系统水平方向动量守恒,设每次起跳机器人的水平速度大小为$v_0$,$B$木板的速度大小为$v_B$,机器人$3$次跳跃的总时间为$t_1$,取向右为正方向,如图所示。
由动量守恒得$(M + m)v_{共} = Mv_0 - mv_B·s①$。
机器人和$B$木板的相对位移为$B$木板长度$L_B$,得$(v_0 + v_B)t_1 = L_B·s②$。
机器人到$B$木板右端时,$B$木板恰好追上$A$木板,得$x_B - x_{A3} = x_{A1} + x_{A2}$,即$(v_B - v_{A2})t_1 = 6 m·s③$。
联立①②③解得$t_1 = \frac{3L_B}{4(v_{A2} + v_{共})}$。
故$A$、$C$两木板间距为$x_{AC} = v_{A2}t_1 + 6 + L_B + v_{共}t_1 = (v_{A2} + v_{共})t_1 + 6 + L_B$,解得$x_{AC} = \frac{7}{4}L_B$。
解题技巧:本题的难点在于机器人与$B$木板组成的是有初速度的人船模型,但可以采取一些方法规避这个初速度。
①取$C$木板为参考系($C$木板做匀速运动,为惯性参考系),则$C$木板不动,$A$木板以大小为$(v_{A2} + v_{共})$的速度向左运动,机器人与$B$木板为无初速的人船模型,如下图所示,满足$Mx = mx$,$x + x = L_B$,解得$x = \frac{3}{4}L_B$,则有$x_{AC} = x + L_B = \frac{7}{4}L_B$。
②将机器人和$B$木板的运动视为整体以$v_{共}$的速度的向右匀速运动模型与人船模型,根据人船模型结论可得$Mx = mx$,$x + x = L_B$,解得$x = \frac{3}{4}L_B$,则$B$木板的实际位移$x = x - v_{共}t = \frac{3}{4}L_B - v_{共}t$,方向向左,则$x_{AC} = x + L_B + x_C = \frac{3}{4}L_B - v_{共}t + L_B + v_{共}t = \frac{7}{4}L_B$。
查看更多完整答案,请扫码查看

