2025年步步高大一轮复习讲义物理教科版
注:目前有些书本章节名称可能整理的还不是很完善,但都是按照顺序排列的,请同学们按照顺序仔细查找。练习册 2025年步步高大一轮复习讲义物理教科版 答案主要是用来给同学们做完题方便对答案用的,请勿直接抄袭。
第380页
- 第307页
- 第308页
- 第309页
- 第310页
- 第311页
- 第312页
- 第313页
- 第314页
- 第315页
- 第316页
- 第317页
- 第318页
- 第319页
- 第320页
- 第321页
- 第322页
- 第323页
- 第324页
- 第325页
- 第326页
- 第327页
- 第328页
- 第329页
- 第330页
- 第331页
- 第332页
- 第333页
- 第334页
- 第335页
- 第336页
- 第337页
- 第338页
- 第339页
- 第340页
- 第341页
- 第342页
- 第343页
- 第344页
- 第345页
- 第346页
- 第347页
- 第348页
- 第349页
- 第350页
- 第351页
- 第352页
- 第353页
- 第354页
- 第355页
- 第356页
- 第357页
- 第358页
- 第359页
- 第360页
- 第361页
- 第362页
- 第363页
- 第364页
- 第365页
- 第366页
- 第367页
- 第368页
- 第369页
- 第370页
- 第371页
- 第372页
- 第373页
- 第374页
- 第375页
- 第376页
- 第377页
- 第378页
- 第379页
- 第380页
- 第381页
- 第382页
- 第383页
- 第384页
- 第385页
- 第386页
- 第387页
- 第388页
- 第389页
- 第390页
- 第391页
- 第392页
- 第393页
- 第394页
- 第395页
- 第396页
- 第397页
- 第398页
- 第399页
- 第400页
- 第401页
- 第402页
- 第403页
- 第404页
4. (8 分)(2024·天津市蓟州区期末)某同学利用如图所示的实验装置验证机械能守恒定律。将气垫导轨固定在水平桌面上,调节旋钮使其水平,在气垫导轨的左端固定一光滑的定滑轮,在 $ B $ 处固定一光电门,测出滑块及遮光条的总质量为 $ m $,将质量为 $ M $ 的钩码通过细线与滑块连接。打开气源,滑块从 $ A $ 处由静止释放,宽度为 $ d $ 的遮光条经过光电门 $ B $ 时挡光时间为 $ t $,$ A $、$ B $ 之间的距离为 $ l $,实验中钩码始终未与地面接触,重力加速度为 $ g $。

(1)(6 分)滑块由 $ A $ 点运动到 $ B $ 点的过程中,系统重力势能减少量 $ \Delta E_p $ 为
(2)(2 分)若实验结果发现按上述公式计算,$ \Delta E_k $ 总是大于 $ \Delta E_p $,可能的原因是
A. 存在空气阻力
B. 测出滑块右端与光电门 $ B $ 之间的距离作为 $ l $
C. 测出滑块左端与光电门 $ B $ 之间的距离作为 $ l $

(1)(6 分)滑块由 $ A $ 点运动到 $ B $ 点的过程中,系统重力势能减少量 $ \Delta E_p $ 为
$Mgl$
,系统动能增加量 $ \Delta E_k $ 为$\frac{(M+m)d^2}{2t^2}$
(均用题中所给字母表示)。(2)(2 分)若实验结果发现按上述公式计算,$ \Delta E_k $ 总是大于 $ \Delta E_p $,可能的原因是
C
。A. 存在空气阻力
B. 测出滑块右端与光电门 $ B $ 之间的距离作为 $ l $
C. 测出滑块左端与光电门 $ B $ 之间的距离作为 $ l $
答案:
4.
(1)$Mgl \frac{(M+m)d^2}{2t^2}$
(2)C
解析
(1)根据重力势能的表达式可知滑块由$A$点运动到$B$点的过程中,系统重力势能减少量$\Delta E_p=Mgl$
滑块在光电门$B$的速度为$v_B=\frac{d}{t}$,
所以系统动能的增加量为
$\Delta E_k=\frac{1}{2}(M+m)v_B^2=\frac{(M+m)d^2}{2t^2}$
(2)若存在空气阻力,$\Delta E_k$总是小于$\Delta E_p$,故A错误;将滑块右端与光电门$B$之间的距离作为$l$,钩码下落的高度偏大,$\Delta E_k$将小于$\Delta E_p$,故B错误;将滑块左端与光电门$B$之间的距离作为$l$,钩码下落的高度偏小,$\Delta E_p$将大于$\Delta E_p$,故C正确。
(1)$Mgl \frac{(M+m)d^2}{2t^2}$
(2)C
解析
(1)根据重力势能的表达式可知滑块由$A$点运动到$B$点的过程中,系统重力势能减少量$\Delta E_p=Mgl$
滑块在光电门$B$的速度为$v_B=\frac{d}{t}$,
所以系统动能的增加量为
$\Delta E_k=\frac{1}{2}(M+m)v_B^2=\frac{(M+m)d^2}{2t^2}$
(2)若存在空气阻力,$\Delta E_k$总是小于$\Delta E_p$,故A错误;将滑块右端与光电门$B$之间的距离作为$l$,钩码下落的高度偏大,$\Delta E_k$将小于$\Delta E_p$,故B错误;将滑块左端与光电门$B$之间的距离作为$l$,钩码下落的高度偏小,$\Delta E_p$将大于$\Delta E_p$,故C正确。
5. (8 分)(2025·湖北武汉市检测)某同学用如图甲所示的装置验证轻弹簧和小物块(带有遮光条)组成的系统机械能守恒。图中光电门安装在铁架台上且位置可调。物块释放前,细线与弹簧和物块的拴接点($ A $、$ B $)在同一水平线上,且弹簧处于原长。滑轮质量不计且滑轮凹槽中涂有润滑油,以保证细线与滑轮之间的摩擦可以忽略不计,细线始终伸直。小物块连同遮光条的总质量为 $ m $,弹簧的劲度系数为 $ k $,重力加速度为 $ g $,遮光条的宽度为 $ d $,小物块释放点与光电门之间的距离为 $ l $($ d $ 远远小于 $ l $)。已知弹簧的弹性势能表达式为 $ E_p = \frac{1}{2}kx^2 $,其中 $ k $ 为弹簧的劲度系数,$ x $ 为弹簧的形变量。现将小物块由静止释放,记录遮光条通过光电门的时间 $ t $。
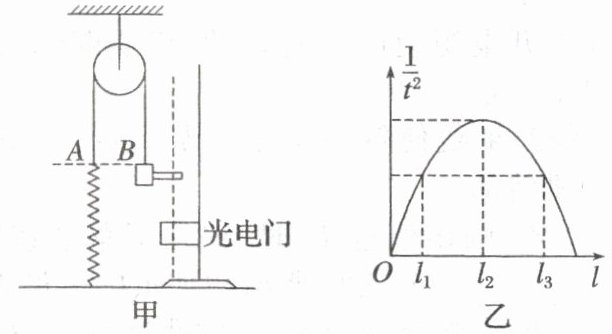
(1)(2 分)改变光电门的位置,重复实验,每次物块均从 $ B $ 点静止释放,记录多组 $ l $ 和对应的时间 $ t $,作出 $ \frac{1}{t^2} - l $ 图像如图乙所示,若在误差允许的范围内,$ \frac{1}{t^2} $ 与 $ l $ 满足关系
(2)(4 分)在(1)中条件下,$ l $ 取某个值时,可以使物块通过光电门时的速度最大,速度最大值为
(3)(2 分)在(1)中条件下,$ l = l_1 $ 和 $ l = l_3 $ 时,物块通过光电门时弹簧具有的弹性势能分别为 $ E_{p1} $、$ E_{p3} $,则 $ E_{p3} - E_{p1} = $
(1)(2 分)改变光电门的位置,重复实验,每次物块均从 $ B $ 点静止释放,记录多组 $ l $ 和对应的时间 $ t $,作出 $ \frac{1}{t^2} - l $ 图像如图乙所示,若在误差允许的范围内,$ \frac{1}{t^2} $ 与 $ l $ 满足关系
$\frac{1}{t^2}=-\frac{k}{md^2}l^2+\frac{2g}{d^2}l$
,可验证轻弹簧和小物块组成的系统机械能守恒。(2)(4 分)在(1)中条件下,$ l $ 取某个值时,可以使物块通过光电门时的速度最大,速度最大值为
$\sqrt{gl_2}$
(用 $ l_2 $、$ g $ 表示),此时物块的加速度大小为0
。(3)(2 分)在(1)中条件下,$ l = l_1 $ 和 $ l = l_3 $ 时,物块通过光电门时弹簧具有的弹性势能分别为 $ E_{p1} $、$ E_{p3} $,则 $ E_{p3} - E_{p1} = $
$k(l_3-l_1)l_2$
(用 $ l_1 $、$ l_2 $、$ l_3 $、$ k $ 表示)。
答案:
5.
(1)$\frac{1}{t^2}=-\frac{k}{md^2}l^2+\frac{2g}{d^2}l$
(2)$\sqrt{gl_2}$ 0
(3)$k(l_3-l_1)l_2$
解析
(1)若系统机械能守恒,则有
$mgl=\frac{1}{2}kl^2+\frac{1}{2}m(\frac{d}{t})^2$,
变式为$\frac{1}{t^2}=-\frac{k}{md^2}l^2+\frac{2g}{d^2}l$,
所以若在误差允许的范围内满足$\frac{1}{t^2}=-\frac{k}{md^2}l^2+\frac{2g}{d^2}l$,即可验证轻弹簧和小物块组成的系统机械能守恒。
(2)由题图乙可知,当$l=l_2$时,遮光条通过光电门的时间最短,此时物块通过光电门时的速度最大,物块加速度大小为0,对其受力分析可得$l_2=\frac{mg}{k}$,由机械能守恒有$mgl_2=\frac{1}{2}kl_2^2+\frac{1}{2}mv_{max}^2$,联立可得$v_{max}=\sqrt{gl_2}$。
(3)由题图乙可知,当$l=l_1$和$l=l_3$时,物块的动能相等,可得$mgl_3=E_{p3}+E_k$,$mgl_1=E_{p1}+E_k$,$l_2=\frac{mg}{k}$,联立
可得$E_{p3}-E_{p1}=k(l_3-l_1)l_2$。
(1)$\frac{1}{t^2}=-\frac{k}{md^2}l^2+\frac{2g}{d^2}l$
(2)$\sqrt{gl_2}$ 0
(3)$k(l_3-l_1)l_2$
解析
(1)若系统机械能守恒,则有
$mgl=\frac{1}{2}kl^2+\frac{1}{2}m(\frac{d}{t})^2$,
变式为$\frac{1}{t^2}=-\frac{k}{md^2}l^2+\frac{2g}{d^2}l$,
所以若在误差允许的范围内满足$\frac{1}{t^2}=-\frac{k}{md^2}l^2+\frac{2g}{d^2}l$,即可验证轻弹簧和小物块组成的系统机械能守恒。
(2)由题图乙可知,当$l=l_2$时,遮光条通过光电门的时间最短,此时物块通过光电门时的速度最大,物块加速度大小为0,对其受力分析可得$l_2=\frac{mg}{k}$,由机械能守恒有$mgl_2=\frac{1}{2}kl_2^2+\frac{1}{2}mv_{max}^2$,联立可得$v_{max}=\sqrt{gl_2}$。
(3)由题图乙可知,当$l=l_1$和$l=l_3$时,物块的动能相等,可得$mgl_3=E_{p3}+E_k$,$mgl_1=E_{p1}+E_k$,$l_2=\frac{mg}{k}$,联立
可得$E_{p3}-E_{p1}=k(l_3-l_1)l_2$。
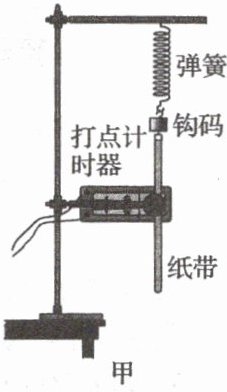
6. (10 分)(2022·河北卷·11)某实验小组利用铁架台、弹簧、钩码、打点计时器、刻度尺等器材验证系统机械能守恒定律,实验装置如图甲所示。弹簧的劲度系数为 $ k $,原长为 $ L_0 $,钩码的质量为 $ m $。已知弹簧的弹性势能表达式为 $ E = \frac{1}{2}kx^2 $,其中 $ k $ 为弹簧的劲度系数,$ x $ 为弹簧的形变量,当地的重力加速度大小为 $ g $。
(1)(6 分)在弹性限度内将钩码缓慢下拉至某一位置,测得此时弹簧的长度为 $ L $。接通打点计时器电源。从静止释放钩码,弹簧收缩,得到了一条点迹清晰的纸带。钩码加速上升阶段的部分纸带如图乙所示,纸带上相邻两点之间的时间间隔均为 $ T $(在误差允许范围内,认为释放钩码的同时打出 $ A $ 点)。从打出 $ A $ 点到打出 $ F $ 点时间内,弹簧的弹性势能减少量为
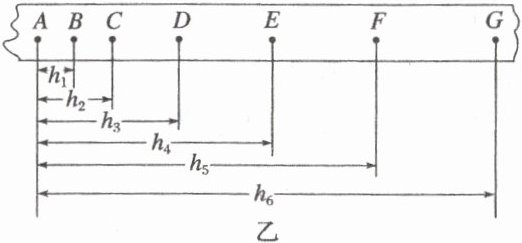
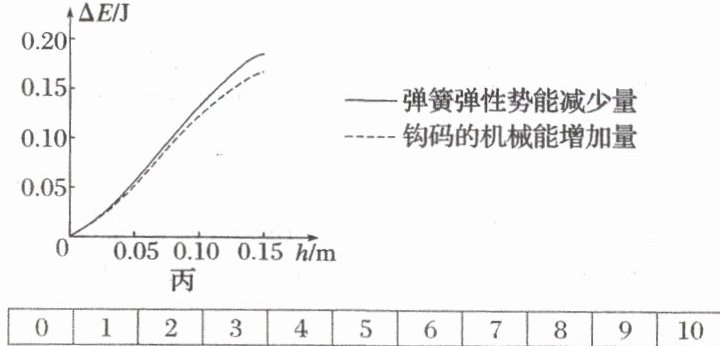
(2)(4 分)利用计算机软件对实验数据进行处理,得到弹簧弹性势能减少量、钩码的机械能增加量分别与钩码上升高度 $ h $ 的关系,如图丙所示。由图丙可知,随着 $ h $ 增加,两条曲线在纵向的间隔逐渐变大,主要原因是________。
(1)(6 分)在弹性限度内将钩码缓慢下拉至某一位置,测得此时弹簧的长度为 $ L $。接通打点计时器电源。从静止释放钩码,弹簧收缩,得到了一条点迹清晰的纸带。钩码加速上升阶段的部分纸带如图乙所示,纸带上相邻两点之间的时间间隔均为 $ T $(在误差允许范围内,认为释放钩码的同时打出 $ A $ 点)。从打出 $ A $ 点到打出 $ F $ 点时间内,弹簧的弹性势能减少量为
$k(L-L_0)h_5-\frac{1}{2}kh_5^2$
,钩码的动能增加量为$m\frac{(h_6-h_4)^2}{8T^2}$
,钩码的重力势能增加量为$mgh_5$
。(2)(4 分)利用计算机软件对实验数据进行处理,得到弹簧弹性势能减少量、钩码的机械能增加量分别与钩码上升高度 $ h $ 的关系,如图丙所示。由图丙可知,随着 $ h $ 增加,两条曲线在纵向的间隔逐渐变大,主要原因是________。
答案:
6.
(1)$k(L-L_0)h_5-\frac{1}{2}kh_5^2$
$m\frac{(h_6-h_4)^2}{8T^2}$
$mgh_5$
(2)见解析
解析
(1)从打出$A$点到打出$F$点时间内,弹簧的弹性势能减少量为
$\Delta E_{p弹}=\frac{1}{2}k(L-L_0)^2-\frac{1}{2}k(L-L_0-h_5)^2$,整理有$\Delta E_{p弹}=k(L-L_0)h_5-\frac{1}{2}kh_5^2$,打$F$点时钩码的速度为$v_F=\frac{h_6-h_4}{2T}$,由于在误差允许的范围内,认为释放钩码的同时打出$A$点,则钩码动能的增加量为$\Delta E_k=\frac{1}{2}mv_F^2-0=m\frac{(h_6-h_4)^2}{8T^2}$,钩码的重力势能增加量为$\Delta E_{p重}=mgh_5$。
(2)钩码机械能的增加量,即钩码动能和重力势能增加量的总和,若无阻力做功,则弹簧弹性势能的减少量等于钩码机械能的增加量。现在随着$h$增加,两条曲线在纵向的间隔逐渐变大,而两条曲线在纵向的间隔即阻力做的功,则产生这个问题的主要原因是钩码和纸带运动的速度逐渐增大,导致空气阻力逐渐增大,以至于空气阻力做的功也逐渐增大。
(1)$k(L-L_0)h_5-\frac{1}{2}kh_5^2$
$m\frac{(h_6-h_4)^2}{8T^2}$
$mgh_5$
(2)见解析
解析
(1)从打出$A$点到打出$F$点时间内,弹簧的弹性势能减少量为
$\Delta E_{p弹}=\frac{1}{2}k(L-L_0)^2-\frac{1}{2}k(L-L_0-h_5)^2$,整理有$\Delta E_{p弹}=k(L-L_0)h_5-\frac{1}{2}kh_5^2$,打$F$点时钩码的速度为$v_F=\frac{h_6-h_4}{2T}$,由于在误差允许的范围内,认为释放钩码的同时打出$A$点,则钩码动能的增加量为$\Delta E_k=\frac{1}{2}mv_F^2-0=m\frac{(h_6-h_4)^2}{8T^2}$,钩码的重力势能增加量为$\Delta E_{p重}=mgh_5$。
(2)钩码机械能的增加量,即钩码动能和重力势能增加量的总和,若无阻力做功,则弹簧弹性势能的减少量等于钩码机械能的增加量。现在随着$h$增加,两条曲线在纵向的间隔逐渐变大,而两条曲线在纵向的间隔即阻力做的功,则产生这个问题的主要原因是钩码和纸带运动的速度逐渐增大,导致空气阻力逐渐增大,以至于空气阻力做的功也逐渐增大。
查看更多完整答案,请扫码查看

