第3页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
- 第125页
- 第126页
- 第127页
- 第128页
- 第129页
- 第130页
- 第131页
- 第132页
1. 当杠杆在
动力
和______阻力
的作用下______静止
时,我们就说杠杆处于平衡状态。
答案:
动力 阻力 静止
2. 杠杆的平衡条件是
动力×动力臂=阻力×阻力臂
,用字母表示可写成$F_1l_1=F_2l_2$
,杠杆的平衡条件也称杠杆原理
。
答案:
动力×动力臂=阻力×阻力臂 $F_1l_1=F_2l_2$ 杠杆原理
1. 如图所示的是小华做“探究杠杆的平衡条件”实验时的情形,下列操作能使杠杆在水平位置平衡的是(
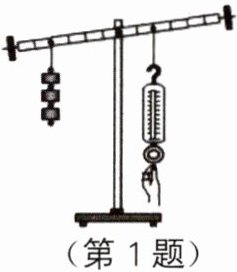
A.增加钩码的个数
B.向左调节平衡螺母
C.向右移动钩码的位置
D.减小弹簧测力计的拉力
C
)A.增加钩码的个数
B.向左调节平衡螺母
C.向右移动钩码的位置
D.减小弹簧测力计的拉力
答案:
C
2. 如图所示,每个钩码的质量为50g,在均匀杠杆的A处挂2个钩码,B处挂1个钩码,杠杆恰好水平平衡。在A、B两处再各加1个钩码,那么(
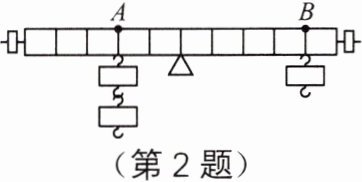
A.杠杆仍水平平衡
B.杠杆的左边向下倾斜
C.杠杆的右边向下倾斜
D.将A处的钩码向左移动一格,杠杆仍能水平平衡
C
)A.杠杆仍水平平衡
B.杠杆的左边向下倾斜
C.杠杆的右边向下倾斜
D.将A处的钩码向左移动一格,杠杆仍能水平平衡
答案:
C
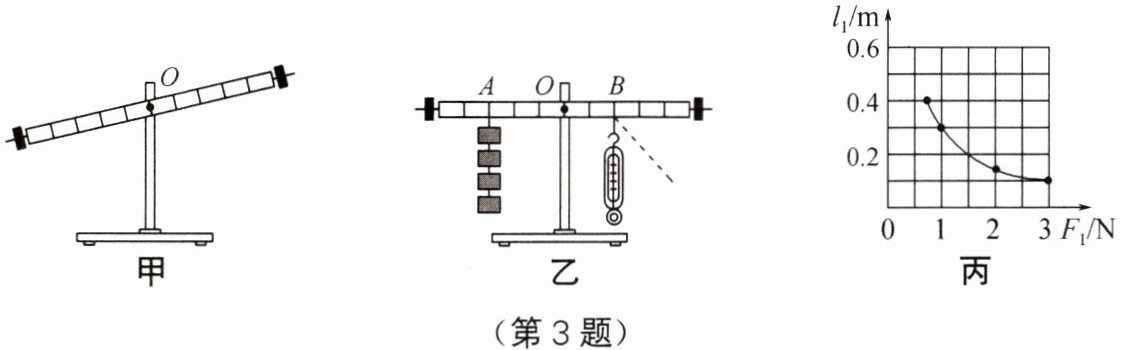
3. 同学们用如图所示装置,“探究杠杆的平衡条件”。
(1)杠杆在如图甲所示的位置静止时
(2)如图乙所示,杠杆上的刻度均匀,在A点挂4个钩码,应在B点挂
(3)本实验中,在B点位置改用弹簧测力计竖直向下拉动,仍可保持杠杆平衡。使用前,应把弹簧测力计指针调节到
(4)保持A点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂$ l_{1} $和动力 $ F_{1} $的数据,绘制了$ l_{1}-F_{1} $的关系图像,如图丙所示。请根据图像推算,当$ F_{1}= 2N $时,$ l_{1}= $
(1)杠杆在如图甲所示的位置静止时
是
(选填“是”或“不是”)处于杠杆的平衡状态。为了使杠杆在水平位置平衡,应向右
(选填“左”或“右”)调节螺母。(2)如图乙所示,杠杆上的刻度均匀,在A点挂4个钩码,应在B点挂
6
个相同的钩码,使杠杆在水平位置平衡;当杠杆平衡后,将A、B两点下方所挂的钩码同时朝远离支点O方向移动一小格,则杠杆顺时针
(选填“顺时针”或“逆时针”)转动。(3)本实验中,在B点位置改用弹簧测力计竖直向下拉动,仍可保持杠杆平衡。使用前,应把弹簧测力计指针调节到
零刻度线
位置上。若将竖直向下拉动的弹簧测力计改为沿着虚线方向拉动,则弹簧测力计的示数将变大
(选填“变大”“变小”或“不变”)。(4)保持A点钩码数量和力臂不变,杠杆在水平位置平衡时,测出多组动力臂$ l_{1} $和动力 $ F_{1} $的数据,绘制了$ l_{1}-F_{1} $的关系图像,如图丙所示。请根据图像推算,当$ F_{1}= 2N $时,$ l_{1}= $
0.15
m。
答案:
1. (1)
杠杆的平衡状态包括静止状态或匀速转动状态,所以杠杆在如图甲所示的位置静止时是处于杠杆的平衡状态。
杠杆左端下沉,为了使杠杆在水平位置平衡,应向右调节螺母。
答案:是;右。
2. (2)
设一个钩码重为$G$,一格的长度为$L$,根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$,$4G×3L = F_{B}×2L$,解得$F_{B}=6G$,所以应在$B$点挂$6$个相同的钩码。
当杠杆平衡后,将$A$、$B$两点下方所挂的钩码同时朝远离支点$O$方向移动一小格,$A$点:$4G×4L = 16GL$,$B$点:$6G×3L = 18GL$,因为$16GL\lt18GL$,所以杠杆顺时针转动。
答案:$6$;顺时针。
3. (3)
使用弹簧测力计前,应把弹簧测力计指针调节到零刻度线位置上。
若将竖直向下拉动的弹簧测力计改为沿着虚线方向拉动,动力臂变小,根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$,阻力和阻力臂不变,动力臂变小,动力变大,所以弹簧测力计的示数将变大。
答案:零刻度线;变大。
4. (4)
根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$,由图像可知,当$F_{1}=1N$时,$l_{1}=0.3m$,则$F_{2}l_{2}=1N×0.3m = 0.3N\cdot m$。
当$F_{1}=2N$时,$l_{1}=\frac{F_{2}l_{2}}{F_{1}}=\frac{0.3N\cdot m}{2N}=0.15m$。
答案:$0.15$。
杠杆的平衡状态包括静止状态或匀速转动状态,所以杠杆在如图甲所示的位置静止时是处于杠杆的平衡状态。
杠杆左端下沉,为了使杠杆在水平位置平衡,应向右调节螺母。
答案:是;右。
2. (2)
设一个钩码重为$G$,一格的长度为$L$,根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$,$4G×3L = F_{B}×2L$,解得$F_{B}=6G$,所以应在$B$点挂$6$个相同的钩码。
当杠杆平衡后,将$A$、$B$两点下方所挂的钩码同时朝远离支点$O$方向移动一小格,$A$点:$4G×4L = 16GL$,$B$点:$6G×3L = 18GL$,因为$16GL\lt18GL$,所以杠杆顺时针转动。
答案:$6$;顺时针。
3. (3)
使用弹簧测力计前,应把弹簧测力计指针调节到零刻度线位置上。
若将竖直向下拉动的弹簧测力计改为沿着虚线方向拉动,动力臂变小,根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$,阻力和阻力臂不变,动力臂变小,动力变大,所以弹簧测力计的示数将变大。
答案:零刻度线;变大。
4. (4)
根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$,由图像可知,当$F_{1}=1N$时,$l_{1}=0.3m$,则$F_{2}l_{2}=1N×0.3m = 0.3N\cdot m$。
当$F_{1}=2N$时,$l_{1}=\frac{F_{2}l_{2}}{F_{1}}=\frac{0.3N\cdot m}{2N}=0.15m$。
答案:$0.15$。
查看更多完整答案,请扫码查看

