第3页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
- 第125页
- 第126页
- 第127页
- 第128页
- 第129页
- 第130页
- 第131页
- 第132页
- 第133页
- 第134页
- 第135页
- 第136页
(1)实验前,某同学在调节杠杆平衡时,发现杠杆的右端翘起,如图所示,此时可以调节右端的平衡螺母,使它向
(2)该同学在本实验中测量 3 组数据的目的是
右
移动;或者调节左端的平衡螺母,使它向右
移动,使杠杆在水平位置平衡,其目的是便于测量力臂
。(2)该同学在本实验中测量 3 组数据的目的是
避免偶然性,寻求普遍规律
。测量的实验数据如下表所示,根据实验结果得出的结论是动力乘动力臂等于阻力乘阻力臂(或$F_{1}l_{1}=F_{2}l_{2}$)
。
答案:
【答案】
(1)右 右 便于测量力臂
(2)避免偶然性,寻求普遍规律 动力乘动力臂等于阻力乘阻力臂(或$F_{1}l_{1}=F_{2}l_{2}$)
(1)右 右 便于测量力臂
(2)避免偶然性,寻求普遍规律 动力乘动力臂等于阻力乘阻力臂(或$F_{1}l_{1}=F_{2}l_{2}$)
2 杠杆质地均匀,每个钩码重 $ 0.5 $ N,下列操作中可以使杠杆在水平位置平衡的是(杠杆上有等间隔的刻度) (
D
)
答案:
D 设杠杆上每一格的长度为L,A选项图中,动力和阻力的作用点都在支点右侧,而且动力和阻力的方向都竖直向下,此时杠杆不能保持水平平衡,A错误;B选项图中,阻力与阻力臂的乘积为1 N×4L,动力与动力臂的乘积为1.5 N×5L,阻力与阻力臂的乘积和动力与动力臂的乘积不相等,因此杠杆不能保持水平平衡,B错误;C选项图中,动力和阻力的作用点在支点两侧,动力和阻力的方向相反,此时杠杆不能保持水平平衡,C错误;D选项图中,动力与动力臂的乘积为2 N×3L,阻力与阻力臂的乘积为1 N×6L,动力与动力臂的乘积和阻力与阻力臂的乘积相等,故杠杆能保持水平平衡,D正确。
3 [2024 盐城盐都区三模]小敏在做“研究杠杆平衡条件”的实验时,先后出现杠杆右端下降的现象。为使杠杆在水平位置平衡,下列操作正确的是 (
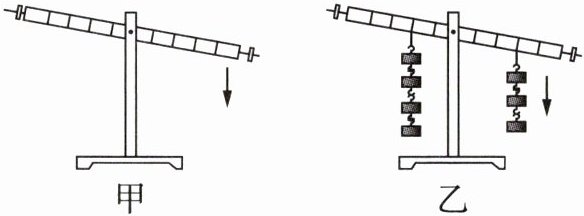
A.图甲中将平衡螺母向左调节;图乙中将右侧钩码向左移动
B.图甲中将平衡螺母向左调节;图乙中将左侧钩码向右移动
C.图甲中将平衡螺母向右调节;图乙中将左侧钩码向左移动
D.图甲中将平衡螺母向右调节;图乙中将左侧钩码向右移动
A
)A.图甲中将平衡螺母向左调节;图乙中将右侧钩码向左移动
B.图甲中将平衡螺母向左调节;图乙中将左侧钩码向右移动
C.图甲中将平衡螺母向右调节;图乙中将左侧钩码向左移动
D.图甲中将平衡螺母向右调节;图乙中将左侧钩码向右移动
答案:
A 由题图甲可知,应将平衡螺母向左调节,由题图乙可知,应将钩码向左移动,故A正确。
易错警示
杠杆的平衡调节为“左沉右调、右沉左调”。
易错警示
杠杆的平衡调节为“左沉右调、右沉左调”。
为了探究轻质杠杆的动力大小与动力臂的关系,小明设计了如图甲所示的装置。测量时,改变动力臂,多次测量,目的是
得出普遍规律
;根据记录的数据画出如图乙所示的动力随动力臂变化的图像。则杠杆左端所挂重物的重力大小是1.5
N(杠杆上每一小格长度为 $ 1 $ cm),小明发现图像中每次描出的点与两坐标轴围成的方形面积(如图中阴影部分)总相等,原因是阻力与阻力臂的乘积保持不变
。
答案:
【答案】得出普遍规律 1.5 阻力与阻力臂的乘积保持不变
审题指导
阻力和阻力臂的乘积不变时,从图像中选择动力和动力臂的对应值,得出动力跟动力臂的乘积也不变,据此解答第二空。
【解析】由一次实验得出的结论具有偶然性,所以多次实验的目的是从大量数据中总结出杠杆的平衡条件,使结论具有普遍性;根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$可知,利用题图乙中一组数据能得出,$F_{2}l_{2}=F_{1}l_{1}=2\ \text{N} × 0.03\ \text{m}=0.06\ \text{N} \cdot \text{m}$,由题图甲可知,$l_{2}=4\ \text{cm}=0.04\ \text{m}$,则杠杆左端所挂重物的重力$G=F_{2}=\frac{F_{1}l_{1}}{l_{2}}=\frac{0.06\ \text{N} \cdot \text{m}}{0.04\ \text{m}}=1.5\ \text{N}$;题图乙中每次描出的点与两坐标轴围成的值方形面积是动力与动力臂的乘积,根据杠杆平衡条件可知,$F_{1}l_{1}=F_{2}l_{2}$,而阻力与阻力臂的值乘积保持不变,故题图乙中每次描出的点与两坐标轴围成的方形面积总相等。
审题指导
阻力和阻力臂的乘积不变时,从图像中选择动力和动力臂的对应值,得出动力跟动力臂的乘积也不变,据此解答第二空。
【解析】由一次实验得出的结论具有偶然性,所以多次实验的目的是从大量数据中总结出杠杆的平衡条件,使结论具有普遍性;根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$可知,利用题图乙中一组数据能得出,$F_{2}l_{2}=F_{1}l_{1}=2\ \text{N} × 0.03\ \text{m}=0.06\ \text{N} \cdot \text{m}$,由题图甲可知,$l_{2}=4\ \text{cm}=0.04\ \text{m}$,则杠杆左端所挂重物的重力$G=F_{2}=\frac{F_{1}l_{1}}{l_{2}}=\frac{0.06\ \text{N} \cdot \text{m}}{0.04\ \text{m}}=1.5\ \text{N}$;题图乙中每次描出的点与两坐标轴围成的值方形面积是动力与动力臂的乘积,根据杠杆平衡条件可知,$F_{1}l_{1}=F_{2}l_{2}$,而阻力与阻力臂的值乘积保持不变,故题图乙中每次描出的点与两坐标轴围成的方形面积总相等。
查看更多完整答案,请扫码查看

