第4页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
5.[2024·镇江期中]如图所示,杠杆调至水平平衡以后,将两个重物分别挂在杠杆两侧的A、B处,杠杆仍然平衡,则两重物重力大小之比$G_{A}:G_{B}=$
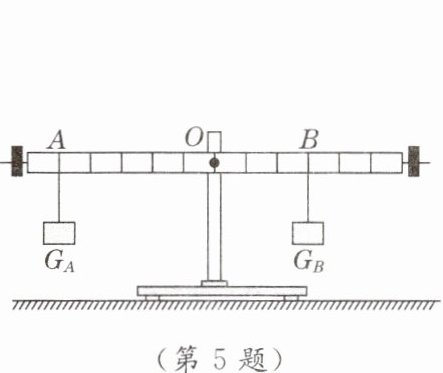
$3:5$
;若再将两重物下端挂上等重的小球,则杠杆的右
端将上升,为使杠杆再次在水平位置平衡,应将悬挂点B向右
移动。
答案:
$3:5$;右;右
6.小明在探究杠杆的平衡条件的实验中,如图所示,将杠杆提升至水平位置静止,此时测力计竖直向上的拉力$F_{1}$为6N,每个钩码的重力均为0.5N,经计算发现,$F_{1}$与其力臂的乘积

大于
(选填“大于”“小于”或“等于”)$F_{2}$与其力臂的乘积,其原因是杠杆自重影响杠杆平衡
。
答案:
大于;杠杆自重影响杠杆平衡
7.为了探究轻质杠杆的动力大小与动力臂的关系,小林设计了如图甲所示的装置。改变动力臂,多次测量,根据记录的数据画出如图乙所示的动力随动力臂变化的图像,杠杆左端所挂重物受到的重力大小是
1.5
N(杠杆上每一小格长度为1cm)。小林发现图像中每次描出的点与两坐标轴围成的矩形面积(图中阴影部分)总相等,原因是阻力与阻力臂的乘积保持不变
。
答案:
1.5;阻力与阻力臂的乘积保持不变
8.(创新装置)小宁用图甲装置做“探究杠杆的平衡条件”实验,杠杆上相邻刻线间的距离相等。

(1)实验前若发现杠杆静止,此时杠杆处于
(2)使杠杆在水平位置平衡后多次实验,得到实验结论后,利用图甲所示的装置,只借助杠杆上的刻度线,右端只使用弹簧测力计,左端只悬挂重物,若弹簧测力计的量程是0~2.5N,当杠杆在水平位置平衡时,通过计算可知,悬挂的重物最重可达
(3)小宁又制作了一个密度均匀的圆盘(相当于杠杆),圆盘可以绕着圆心O转动(转轴阻力忽略不计),他先在圆盘的C点挂上4个钩码(如图乙),再用一个量程合适的弹簧测力计在M点施加竖直向上的拉力后,圆盘
(4)为了探究“力的作用点到支点的距离是否影响杠杆的平衡”,小宁在圆盘的C点挂上4个钩码(如图乙),又在G点挂上一定数量的钩码后发现圆盘在图示位置平衡。为了改变支点到力的作用点的距离,他将挂在G点的钩码先后挂在
(1)实验前若发现杠杆静止,此时杠杆处于
平衡
状态。(2)使杠杆在水平位置平衡后多次实验,得到实验结论后,利用图甲所示的装置,只借助杠杆上的刻度线,右端只使用弹簧测力计,左端只悬挂重物,若弹簧测力计的量程是0~2.5N,当杠杆在水平位置平衡时,通过计算可知,悬挂的重物最重可达
12.5
N。(3)小宁又制作了一个密度均匀的圆盘(相当于杠杆),圆盘可以绕着圆心O转动(转轴阻力忽略不计),他先在圆盘的C点挂上4个钩码(如图乙),再用一个量程合适的弹簧测力计在M点施加竖直向上的拉力后,圆盘
不能
在图示位置静止。(4)为了探究“力的作用点到支点的距离是否影响杠杆的平衡”,小宁在圆盘的C点挂上4个钩码(如图乙),又在G点挂上一定数量的钩码后发现圆盘在图示位置平衡。为了改变支点到力的作用点的距离,他将挂在G点的钩码先后挂在
D、N
两个点又进行了两次实验,发现圆盘仍在图示位置平衡。
答案:
(1)平衡
(2)12.5
(3)不能
(4)D、N
(1)平衡
(2)12.5
(3)不能
(4)D、N
查看更多完整答案,请扫码查看

