第69页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
5.(2024岳阳三模)如图是小明做俯卧撑时撑地静止的情景,O、B分别为脚、手与地面的接触点(双手接触点视为1个),A为其重心,已知小明的重力为560 N。将小明做俯卧撑过程中的身体视为杠杆,________点为支点;小明撑地静止时,地面对双手的支持力为________N,双手所受地面支持力________(选填“大于”“小于”或“等于”)双脚所受地面支持力。

答案:
答案 O 400 大于
解析 由题图可知,小明在做俯卧撑时,身体绕脚与地面的接触点O转动,因此,点O就是杠杆的支点。小明撑地静止时,其重力为阻力,地面对双手的支持力为动力,由图可知,阻力臂lc = 1.0m,动力臂lf = (1.0m + 0.4m) = 1.4m,由杠杆平衡条件可得F×1.4m = 560N×1.0m,解得地面对双手的支持力F = 400N。由于小明的身体是一个整体,他受到的支持力应该作用在他的重心A上,并且由双手和双脚共同承担,此时可以将小明的身体看做以A点为支点的杠杆,地面对手的支持力为动力F1,动力臂l1 = 0.4m,地面对脚的支持力为阻力F2,阻力臂l2 = 1.0m,则根据杠杆平衡原理F1l1 = F2l2可知,当l1<l2时,双手所受地面支持力F1大于双脚所受地面支持力F2。
解析 由题图可知,小明在做俯卧撑时,身体绕脚与地面的接触点O转动,因此,点O就是杠杆的支点。小明撑地静止时,其重力为阻力,地面对双手的支持力为动力,由图可知,阻力臂lc = 1.0m,动力臂lf = (1.0m + 0.4m) = 1.4m,由杠杆平衡条件可得F×1.4m = 560N×1.0m,解得地面对双手的支持力F = 400N。由于小明的身体是一个整体,他受到的支持力应该作用在他的重心A上,并且由双手和双脚共同承担,此时可以将小明的身体看做以A点为支点的杠杆,地面对手的支持力为动力F1,动力臂l1 = 0.4m,地面对脚的支持力为阻力F2,阻力臂l2 = 1.0m,则根据杠杆平衡原理F1l1 = F2l2可知,当l1<l2时,双手所受地面支持力F1大于双脚所受地面支持力F2。
6.(2024衡阳一模)如图,长1 m、重2 N的均匀木板放在水平桌面上,木板左端伸出左边沿4 dm,其上方挂一诱饵。现有一重1 N的老鼠偷吃食物,沿木板向左端爬去,当老鼠爬到离桌沿________m时,木板会失去平衡,而使它落入木板下面的水桶中;理论上这个机关对重力不大于________N的老鼠没有危险。

答案:
答案 0.2 0.5
解析 分析可知,均匀木板的重心在其几何中心,支点在木板与桌面边缘的交点处,则木板受到重力的力臂l2 = $\frac{1m}{10}$×1 = 0.1m,老鼠与桌沿的距离即老鼠对木板压力的力臂为l1,由杠杆平衡条件得G老鼠l1 = G木板l2,即1N×l1 = 2N×0.1m,解得当老鼠爬到与桌沿的距离l1 = 0.2m时,木板会失去平衡。
当老鼠走到木板最左端时,木板刚好要发生转动,则此时有G老鼠'l1' = G木板l2,即G老鼠'×0.4m = 2N×0.1m,则G老鼠' = 0.5N,说明理论上这个机关对重力不大于0.5N的老鼠没有危险。
解析 分析可知,均匀木板的重心在其几何中心,支点在木板与桌面边缘的交点处,则木板受到重力的力臂l2 = $\frac{1m}{10}$×1 = 0.1m,老鼠与桌沿的距离即老鼠对木板压力的力臂为l1,由杠杆平衡条件得G老鼠l1 = G木板l2,即1N×l1 = 2N×0.1m,解得当老鼠爬到与桌沿的距离l1 = 0.2m时,木板会失去平衡。
当老鼠走到木板最左端时,木板刚好要发生转动,则此时有G老鼠'l1' = G木板l2,即G老鼠'×0.4m = 2N×0.1m,则G老鼠' = 0.5N,说明理论上这个机关对重力不大于0.5N的老鼠没有危险。
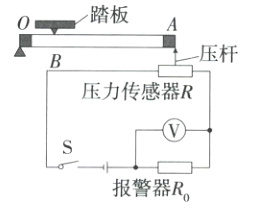
7.(2024长沙一模)某物理兴趣小组设计了一个压力报警装置,工作原理如图所示。ABO为一水平杠杆,OA长120 cm,O为支点,AB∶OB = 5∶1。已知报警器R0的阻值恒为10 Ω,压力传感器R固定放置,R的阻值随所受压力F变化的关系如表所示。闭合开关S,水平踏板空载时,电压表的示数为2 V;当水平踏板所受压力增大,电压表示数达到5 V时,报警器R0开始发出报警信号(踏板、压杆和杠杆的质量均忽略不计)。电源电压为______V。报警器开始报警时,踏板设定的最大压力值为________N;若电源电压变为14 V,为保证报警器仍在踏板原设定的最大压力值时报警,应在杠杆上水平调节踏板触点B的位置,则触点B应移动______cm。
|F/N|0|5|10|15|20|25|30|…|
|----|----|----|----|----|----|----|----|----|
|R/Ω|45|34|24|18|14|12|10|…|
|F/N|0|5|10|15|20|25|30|…|
|----|----|----|----|----|----|----|----|----|
|R/Ω|45|34|24|18|14|12|10|…|
答案:
答案 11 150 8
解析 由图可知,R0与R串联,电压表测R0两端的电压。闭合开关S,水平踏板空载时,电压表的示数U0 = 2V,因串联电路中各处的电流相等,所以,通过压力传感器R的电流IR = I0 = $\frac{U0}{R0}$ = $\frac{2V}{10Ω}$ = 0.2A,由表格数据可知,水平踏板空载时,压力传感器R = 45Ω,因串联电路中总电阻等于各分电阻之和,故电源电压
U电 = IR总 = I0(R0 + R) = 0.2A×(10Ω + 45Ω) = 11V;
当水平踏板所受压力增大,电压表示数达到5V时,报警器R0开始发出报警信号,因串联电路中总电压等于各分电压之和,所以,此时传感器R两端的电压
UR = U电 - U0' = 11V - 5V = 6V,此时电路中的电流
I' = $\frac{U0'}{R0}$ = $\frac{5V}{10Ω}$ = 0.5A,
串联电路中电流处处相等,则此时传感器的阻值
R' = $\frac{UR}{I'}$ = $\frac{6V}{0.5A}$ = 12Ω,
由表格数据可知,传感器受到的压力FA = 25N,
因为OA = 120cm,AB∶OB = 5∶1,可得OB = 20cm。
由杠杆的平衡条件可得F踏·OB = FA·OA,代入数据可得踏板设定的最大压力值
F踏 = $\frac{OA}{OB}$·FA = $\frac{120cm}{20cm}$×25N = 150N;
若电源电压变为14V,为保证报警器仍在踏板原设定的最大压力值时报警,则报警器两端的电压U0' = 5V、电路中的电流I' = 0.5A不变,踏板的最大压力F踏 = 150N不变,此时传感器两端的电压
UR' = U电' - U0' = 14V - 5V = 9V,
此时压力传感器的阻值R'' = $\frac{UR'}{I'}$ = $\frac{9V}{0.5A}$ = 18Ω,
由表格数据可知,传感器受到的压力FA' = 15N,
由杠杆的平衡条件可得F踏·OB' = FA'·OA,代入数据可得OB' = $\frac{FA'}{F踏}$·OA = $\frac{15N}{150N}$×120cm = 12cm,由OB = 20cm和OB' = 12cm可得触点B应向左移动8cm。
解析 由图可知,R0与R串联,电压表测R0两端的电压。闭合开关S,水平踏板空载时,电压表的示数U0 = 2V,因串联电路中各处的电流相等,所以,通过压力传感器R的电流IR = I0 = $\frac{U0}{R0}$ = $\frac{2V}{10Ω}$ = 0.2A,由表格数据可知,水平踏板空载时,压力传感器R = 45Ω,因串联电路中总电阻等于各分电阻之和,故电源电压
U电 = IR总 = I0(R0 + R) = 0.2A×(10Ω + 45Ω) = 11V;
当水平踏板所受压力增大,电压表示数达到5V时,报警器R0开始发出报警信号,因串联电路中总电压等于各分电压之和,所以,此时传感器R两端的电压
UR = U电 - U0' = 11V - 5V = 6V,此时电路中的电流
I' = $\frac{U0'}{R0}$ = $\frac{5V}{10Ω}$ = 0.5A,
串联电路中电流处处相等,则此时传感器的阻值
R' = $\frac{UR}{I'}$ = $\frac{6V}{0.5A}$ = 12Ω,
由表格数据可知,传感器受到的压力FA = 25N,
因为OA = 120cm,AB∶OB = 5∶1,可得OB = 20cm。
由杠杆的平衡条件可得F踏·OB = FA·OA,代入数据可得踏板设定的最大压力值
F踏 = $\frac{OA}{OB}$·FA = $\frac{120cm}{20cm}$×25N = 150N;
若电源电压变为14V,为保证报警器仍在踏板原设定的最大压力值时报警,则报警器两端的电压U0' = 5V、电路中的电流I' = 0.5A不变,踏板的最大压力F踏 = 150N不变,此时传感器两端的电压
UR' = U电' - U0' = 14V - 5V = 9V,
此时压力传感器的阻值R'' = $\frac{UR'}{I'}$ = $\frac{9V}{0.5A}$ = 18Ω,
由表格数据可知,传感器受到的压力FA' = 15N,
由杠杆的平衡条件可得F踏·OB' = FA'·OA,代入数据可得OB' = $\frac{FA'}{F踏}$·OA = $\frac{15N}{150N}$×120cm = 12cm,由OB = 20cm和OB' = 12cm可得触点B应向左移动8cm。
8.(2024益阳三模)如图甲是小明在植树节用铁锹铲土时的情景,铁锹可视为杠杆,图乙是其简化图,O为支点,请在图乙中画出作用在A处的最小动力F1及其力臂l。

答案:
答案 如图所示

解析 在阻力跟阻力臂的乘积一定时,由杠杆平衡条件可知动力臂越长,动力越小;支点在O点,动力作用点在A点,因此OA作为动力臂最长,过A点垂直于OA向上作出最小动力F。
答案 如图所示
解析 在阻力跟阻力臂的乘积一定时,由杠杆平衡条件可知动力臂越长,动力越小;支点在O点,动力作用点在A点,因此OA作为动力臂最长,过A点垂直于OA向上作出最小动力F。
9.(2024广东广州)如图,吊车在建筑工地进行作业时,由支腿将吊车撑起并脱离地面,吊臂上的滑轮组在1 s内,将重为9×10³ N的建筑材料沿竖直方向匀速提升1 m,滑轮组上钢丝绳自由端受到的拉力F为5×10³ N。
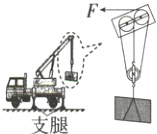
(1)支腿做成“ ”形而非“
”形而非“ ”形的作用是____________________;
”形的作用是____________________;
(2)求钢丝绳自由端的移动速度;
(3)求拉力F的功率和滑轮组的机械效率。
(1)支腿做成“
”形而非“”形的作用是____________________;(2)求钢丝绳自由端的移动速度;
(3)求拉力F的功率和滑轮组的机械效率。
答案:
答案
(1)减小压强
(2)3m/s
(3)1.5×10⁴W 60%
解析
(1)根据p = $\frac{F}{S}$,在压力F一定时,增大受力面积S,可以减小压强p,支腿做成下宽上窄的作用是在压力一定时,增大受力面积,减小支腿对地面的压强。
(2)依题意,承重绳股数n = 3,
则钢丝绳自由端移动距离s = nh = 3×1m = 3m,
钢丝绳自由端的移动速度v = $\frac{s}{t}$ = $\frac{3m}{1s}$ = 3m/s。
(3)拉力做功W总 = Fs = 5×10³N×3m = 1.5×10⁴J,
拉力做功功率P = $\frac{W总}{t}$ = $\frac{1.5×10⁴J}{1s}$ = 1.5×10⁴W。
滑轮组提升建筑材料所做有用功
W有 = Gh = 9×10³N×1m = 9×10³J,
滑轮组机械效率η = $\frac{W有}{W总}$ = $\frac{9×10³J}{1.5×10⁴J}$ = 60%。
(1)减小压强
(2)3m/s
(3)1.5×10⁴W 60%
解析
(1)根据p = $\frac{F}{S}$,在压力F一定时,增大受力面积S,可以减小压强p,支腿做成下宽上窄的作用是在压力一定时,增大受力面积,减小支腿对地面的压强。
(2)依题意,承重绳股数n = 3,
则钢丝绳自由端移动距离s = nh = 3×1m = 3m,
钢丝绳自由端的移动速度v = $\frac{s}{t}$ = $\frac{3m}{1s}$ = 3m/s。
(3)拉力做功W总 = Fs = 5×10³N×3m = 1.5×10⁴J,
拉力做功功率P = $\frac{W总}{t}$ = $\frac{1.5×10⁴J}{1s}$ = 1.5×10⁴W。
滑轮组提升建筑材料所做有用功
W有 = Gh = 9×10³N×1m = 9×10³J,
滑轮组机械效率η = $\frac{W有}{W总}$ = $\frac{9×10³J}{1.5×10⁴J}$ = 60%。
查看更多完整答案,请扫码查看

