2025年期中期末名校名区真题精编高一物理上册人教版
注:目前有些书本章节名称可能整理的还不是很完善,但都是按照顺序排列的,请同学们按照顺序仔细查找。练习册 2025年期中期末名校名区真题精编高一物理上册人教版 答案主要是用来给同学们做完题方便对答案用的,请勿直接抄袭。
第12页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
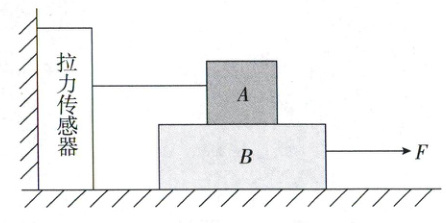
15. (16 分)如图所示,$A$、$B$ 两个质量均为 $m$ 的物体叠放在水平面上,$B$ 物体的上下表面均水平,$A$ 物体与一拉力传感器相连接,连接拉力传感器和物体 $A$ 的细绳保持水平。从 $t = 0$ 时刻起,用一水平向右且 $F = kt$($k$ 为常量)的力作用在 $B$ 物体上,且最大静摩擦力等于滑动摩擦力。$A$ 与 $B$、$B$ 与水平面间的动摩擦因数均为 $\mu$,重力加速度为 $g$。
(1)求 $B$ 与地面间的最大静摩擦力大小;
(2)一段时间 $\Delta t$ 后,$A$、$B$ 会相对滑动,求 $\Delta t$ 和此时 $A$、$B$ 间摩擦力的大小;
(3)请画出拉力传感器的示数随时间 $t$ 变化的图像。
(1)求 $B$ 与地面间的最大静摩擦力大小;
(2)一段时间 $\Delta t$ 后,$A$、$B$ 会相对滑动,求 $\Delta t$ 和此时 $A$、$B$ 间摩擦力的大小;
(3)请画出拉力传感器的示数随时间 $t$ 变化的图像。
答案:
15.
(1)$2\mu mg$
(2)$\frac{3\mu mg}{k}$ $\mu mg$
(3) 见解析
[解析] 本题主要考查整体法和隔离法的应用
(1) 对$A$、$B$整体进行分析可知,地面对$B$的支持力大小为$N_B = 2mg$,由题意可知$B$与地面间的最大静摩擦力为$f_{B\max} = \mu N_B = 2\mu mg$。
(2) 一段时间$\Delta t$后,$A$、$B$发生相对滑动,此时$A$、$B$间的滑动摩擦力的大小为$f_{AB\max} = \mu N_A = \mu mg$。对$B$进行受力分析可知$F = k\Delta t = f_{B\max} + f_{AB\max}$,解得$\Delta t = \frac{3\mu mg}{k}$。
(3) 对$A$进行受力分析可知,$\Delta t$时刻以后,拉力传感器的示数恒定,为$F_{传} = f_{AB\max} = \mu mg$。假设$t_1$时刻前,外力$F$与地面对$B$的摩擦力平衡,此过程传感器上无示数,则有$kt_1 = f_{B\max}$,解得$t_1 = \frac{2\mu mg}{k}$。由于$F = kt$,易知在$t_1 \sim \Delta t$期间,$kt = f_{B\max} + f_{AB} = f_{B\max} + F_{传}$,$F_{传}$随时间$t$线性增大。综上所述,拉力传感器的示数随时间$t$变化的图像如图所示。
(1)$2\mu mg$
(2)$\frac{3\mu mg}{k}$ $\mu mg$
(3) 见解析
[解析] 本题主要考查整体法和隔离法的应用
(1) 对$A$、$B$整体进行分析可知,地面对$B$的支持力大小为$N_B = 2mg$,由题意可知$B$与地面间的最大静摩擦力为$f_{B\max} = \mu N_B = 2\mu mg$。
(2) 一段时间$\Delta t$后,$A$、$B$发生相对滑动,此时$A$、$B$间的滑动摩擦力的大小为$f_{AB\max} = \mu N_A = \mu mg$。对$B$进行受力分析可知$F = k\Delta t = f_{B\max} + f_{AB\max}$,解得$\Delta t = \frac{3\mu mg}{k}$。
(3) 对$A$进行受力分析可知,$\Delta t$时刻以后,拉力传感器的示数恒定,为$F_{传} = f_{AB\max} = \mu mg$。假设$t_1$时刻前,外力$F$与地面对$B$的摩擦力平衡,此过程传感器上无示数,则有$kt_1 = f_{B\max}$,解得$t_1 = \frac{2\mu mg}{k}$。由于$F = kt$,易知在$t_1 \sim \Delta t$期间,$kt = f_{B\max} + f_{AB} = f_{B\max} + F_{传}$,$F_{传}$随时间$t$线性增大。综上所述,拉力传感器的示数随时间$t$变化的图像如图所示。
查看更多完整答案,请扫码查看

