第6页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
8. 如图所示,园艺工人在修剪枝条时,常把枝条尽量往剪刀的轴处靠近,这样做是为了(
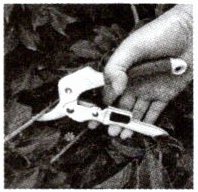
A.增大动力臂,能够省力
B.增大阻力臂,方便使用
C.减小动力臂,方便使用
D.减小阻力臂,能够省力
]
D
)A.增大动力臂,能够省力
B.增大阻力臂,方便使用
C.减小动力臂,方便使用
D.减小阻力臂,能够省力
]
答案:
D [点拨]常把枝条尽量往剪刀的轴处靠近,阻力臂减小,阻力与阻力臂的乘积减小,动力臂不变,则动力减小,能够省力。
9. 踮脚是一项很好的有氧运动(如图),它简单易学,不受场地的限制,深受广大群众的喜爱,踮脚运动的基本模型是杠杆。下列分析正确的是(
A.脚后跟是支点,是省力杠杆
B.脚后跟是支点,是费力杠杆
C.脚掌与地面接触的地方是支点,是省力杠杆
D.脚掌与地面接触的地方是支点,是费力杠杆
]
C
)A.脚后跟是支点,是省力杠杆
B.脚后跟是支点,是费力杠杆
C.脚掌与地面接触的地方是支点,是省力杠杆
D.脚掌与地面接触的地方是支点,是费力杠杆
]
答案:
C [点拨]踮脚时,脚掌与地面接触的地方是支点,小腿肌肉对脚的拉力是动力,重力是阻力,动力臂大于阻力臂,是省力杠杆。
10. [2024·苏州]健身步道上的坐式划船训练器如图所示。人坐在座板上,用始终与把手垂直的力缓慢向后将把手拉至身体两侧,此过程中,拉力大小变化情况是
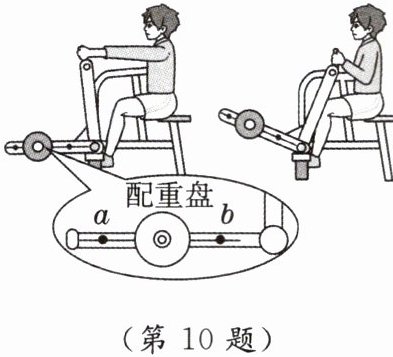
逐渐变小
。若要增加训练强度,应将配重盘向a
(填“a”或“b”)端移。
答案:
逐渐变小;a [点拨]人坐在座板上,用始终与把手垂直的力缓慢向后将把手拉至身体两侧,此过程中,阻力即配重盘受到的重力不变,阻力臂变小,动力臂不变,根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$可知,动力变小,即拉力逐渐变小。若要增加训练强度,即增大拉力,在阻力不变的情况下,应增大阻力臂,即将配重盘向a端移动。
11. [2024·泰州兴化期中]笔记本电脑在人们日常生活中起着重要的作用,如图所示是一个笔记本电脑的侧面图,用始终与电脑屏幕垂直的力F掀开屏幕到竖直位置的过程中,力F______
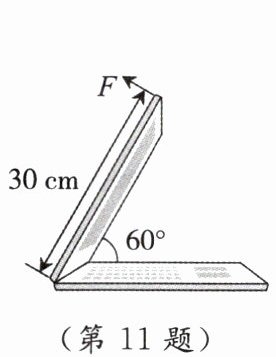
变小
(填“变大”“变小”或“不变”),若笔记本电脑屏幕质量为400g,由图可知,此时力F= ______1
N(不计屏幕与转轴的阻力,g取10N/kg)。
答案:
变小;1
12. 图甲是压制饺子皮的“神器”,压皮时压杆可视为一个杠杆,图乙是简化示意图,图中O为支点$,F_2$为压饺子皮时作用在B点的阻力。请在图乙中画出压饺子皮时作用在A点的最小动力$F_1$及阻力$F_2$的力臂$l_2。$

答案:
[解]如图所示。

⚡点技巧 根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$可知,$F_{2}$、$l_{2}$的乘积一定时,动力臂$l_{1}$最长时动力$F_{1}$最小。找杠杆“最小力”的一般方法:杠杆上离支点最远的点为最小力作用点;支点与最小力作用点的连线为最长力臂;根据“动力与阻力使杠杆转动的方向相反”判断动力的方向并作出最小力示意图。
[解]如图所示。
⚡点技巧 根据杠杆平衡条件$F_{1}l_{1}=F_{2}l_{2}$可知,$F_{2}$、$l_{2}$的乘积一定时,动力臂$l_{1}$最长时动力$F_{1}$最小。找杠杆“最小力”的一般方法:杠杆上离支点最远的点为最小力作用点;支点与最小力作用点的连线为最长力臂;根据“动力与阻力使杠杆转动的方向相反”判断动力的方向并作出最小力示意图。
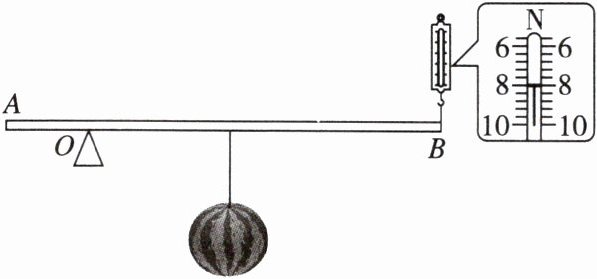
13. 一轻质杠杆AB水平放置,在杠杆上悬挂一个西瓜,杠杆长1m,O为杠杆的支点,OA长0.2m,在B点用弹簧测力计竖直提起,其装置如图所示。
(1)该杠杆属于哪种类型。(直接回答)
(2)若西瓜悬挂点距O点0.4m,弹簧测力计的示数为8N,求该西瓜的重力。
(3)要使轻质杠杆AB始终处于水平平衡,求西瓜悬挂点与O点的最大距离?
]
(1)该杠杆属于哪种类型。(直接回答)
(2)若西瓜悬挂点距O点0.4m,弹簧测力计的示数为8N,求该西瓜的重力。
(3)要使轻质杠杆AB始终处于水平平衡,求西瓜悬挂点与O点的最大距离?
]
答案:
[解]
(1)省力杠杆。
(2)杠杆长1m,O为杠杆的支点,OA长0.2m,则动力臂的长度为$l_{1}=OB=1m - 0.2m = 0.8m$,阻力臂$l_{2}=0.4m$,阻力大小等于西瓜的重力大小,由杠杆平衡条件可得$Fl_{1}=Gl_{2}$,西瓜的重力为$G=\frac{l_{1}}{l_{2}}× F=\frac{0.8m}{0.4m}×8N = 16N$。
(3)由图可知,弹簧测力计最大测量值为10N,当弹簧测力计的示数为10N时,根据杠杆平衡条件知,$G× d=F_{\text{最大}}× OB$,$16N× d=10N×0.8m$,解得$d = 0.5m$,则西瓜悬挂点与O点的最大距离为0.5m。
(1)省力杠杆。
(2)杠杆长1m,O为杠杆的支点,OA长0.2m,则动力臂的长度为$l_{1}=OB=1m - 0.2m = 0.8m$,阻力臂$l_{2}=0.4m$,阻力大小等于西瓜的重力大小,由杠杆平衡条件可得$Fl_{1}=Gl_{2}$,西瓜的重力为$G=\frac{l_{1}}{l_{2}}× F=\frac{0.8m}{0.4m}×8N = 16N$。
(3)由图可知,弹簧测力计最大测量值为10N,当弹簧测力计的示数为10N时,根据杠杆平衡条件知,$G× d=F_{\text{最大}}× OB$,$16N× d=10N×0.8m$,解得$d = 0.5m$,则西瓜悬挂点与O点的最大距离为0.5m。
查看更多完整答案,请扫码查看

