第3页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
1. 杠杆处于平衡状态时,下列说法中正确的是 ()
A. 动力和阻力的大小一定相同
B. 动力臂一定等于阻力臂
C. 若动力为阻力的$\frac {1}{2}$,则动力臂为阻力臂的2倍
D. 支点一定在动力作用点和阻力作用点之间
A. 动力和阻力的大小一定相同
B. 动力臂一定等于阻力臂
C. 若动力为阻力的$\frac {1}{2}$,则动力臂为阻力臂的2倍
D. 支点一定在动力作用点和阻力作用点之间
答案:
C
2. 新素养 科学探究 (2025·湖南长沙期末)物理兴趣小组的同学们想得到质量相等的两块胡萝卜,他们设计了如图甲所示方案:用细绳将胡萝卜吊起,调节细绳的位置,使胡萝卜在水平方向上静止,然后从细绳位置将胡萝卜竖直切开即可.为了验证该方案的科学性,小组同学想利用铁架台、杠杆、细线和质量相等的若干钩码探究“杠杆的平衡条件”.
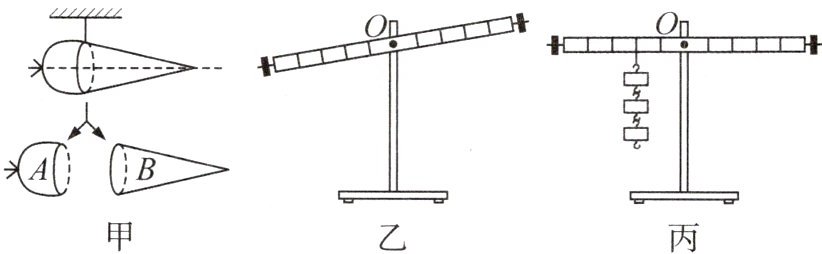
(1) 安装好实验装置后,杠杆在图乙所示位置静止,此时杠杆处于____(选填“平衡”或“非平衡”)状态;为使杠杆在水平位置平衡,应将杠杆的平衡螺母向____(选填“左”或“右”)调节;使杠杆在水平位置平衡的目的是____.
(2) 同学们在不同的位置挂不同数量的钩码,移动钩码位置,使杠杆重新水平平衡,记录实验数据如下表.
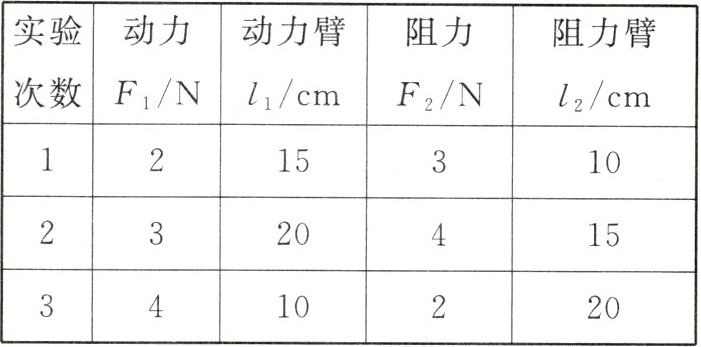
分析实验数据可得出杠杆的平衡条件是____.
(3) 他们在继续探究时,如图丙,保持左侧悬挂钩码的数量和位置不变,调节右侧悬挂钩码的数量和位置,使杠杆始终在水平位置平衡,记录对应的力$F和力臂L$的大小,绘制成如图丁所示的图像.图像中每个点与两坐标轴围成的方形面积____(选填“相等”或“不相等”).
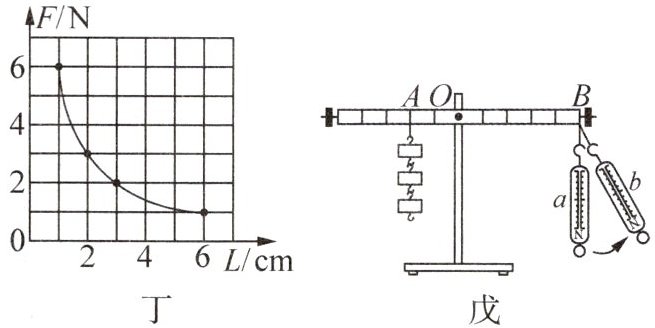
(4) 如图戊所示,实验中始终保持杠杆在水平位置平衡,将弹簧测力计由图中$a位置移至b$位置时,测力计示数将____(选填“变大”“变小”或“不变”).
(5) 请你根据“探究杠杆的平衡条件”的结果,分析图甲中的方案____(选填“可行”或“不可行”),并说明理由:____.
(1) 安装好实验装置后,杠杆在图乙所示位置静止,此时杠杆处于____(选填“平衡”或“非平衡”)状态;为使杠杆在水平位置平衡,应将杠杆的平衡螺母向____(选填“左”或“右”)调节;使杠杆在水平位置平衡的目的是____.
(2) 同学们在不同的位置挂不同数量的钩码,移动钩码位置,使杠杆重新水平平衡,记录实验数据如下表.
分析实验数据可得出杠杆的平衡条件是____.
(3) 他们在继续探究时,如图丙,保持左侧悬挂钩码的数量和位置不变,调节右侧悬挂钩码的数量和位置,使杠杆始终在水平位置平衡,记录对应的力$F和力臂L$的大小,绘制成如图丁所示的图像.图像中每个点与两坐标轴围成的方形面积____(选填“相等”或“不相等”).
(4) 如图戊所示,实验中始终保持杠杆在水平位置平衡,将弹簧测力计由图中$a位置移至b$位置时,测力计示数将____(选填“变大”“变小”或“不变”).
(5) 请你根据“探究杠杆的平衡条件”的结果,分析图甲中的方案____(选填“可行”或“不可行”),并说明理由:____.
答案:
(1) 平衡 右 便于测量力臂
(2) $F_{1}l_{1}=F_{2}l_{2}$
(3) 相等
(4) 变大
(5) 不可行 见解析
解析:
(1) 杠杆在图乙所示位置静止,处于平衡状态,但不是水平位置平衡. 由于杠杆右端偏高,应将杠杆的平衡螺母向右调节,使杠杆在水平位置平衡. 使杠杆在水平位置平衡的目的是便于测量力臂.
(2) 分析实验数据,可以看出:动力 $F_{1}$ 与动力臂 $l_{1}$ 的乘积等于阻力 $F_{2}$ 与阻力臂 $l_{2}$ 的乘积,即 $F_{1}l_{1}=F_{2}l_{2}$. 这就是杠杆的平衡条件.
(3) 由于杠杆始终在水平位置平衡,所以每个力 $F$ 与对应的力臂 $L$ 的乘积都等于杠杆左侧力与力臂的乘积,而左侧悬挂钩码的数量和位置不变,因此每个力 $F$ 与力臂 $L$ 的乘积都相等,即图丁中每个点与两坐标轴围成的方形面积相等.
(4) 如图戊所示,实验中始终保持杠杆在水平位置平衡,将弹簧测力计由图中 $a$ 位置移至 $b$ 位置时,动力臂变小,而阻力与阻力臂的乘积不变,根据杠杆的平衡条件可知,动力变大,所以测力计示数将变大.
(5) 由于胡萝卜的重心不在其几何中心,所以胡萝卜在水平方向上静止时,萝卜头部的重心到支点的距离小于尾部的重心到支点的距离,则头部的质量大于尾部的质量. 因此,该方案不可行.
(1) 平衡 右 便于测量力臂
(2) $F_{1}l_{1}=F_{2}l_{2}$
(3) 相等
(4) 变大
(5) 不可行 见解析
解析:
(1) 杠杆在图乙所示位置静止,处于平衡状态,但不是水平位置平衡. 由于杠杆右端偏高,应将杠杆的平衡螺母向右调节,使杠杆在水平位置平衡. 使杠杆在水平位置平衡的目的是便于测量力臂.
(2) 分析实验数据,可以看出:动力 $F_{1}$ 与动力臂 $l_{1}$ 的乘积等于阻力 $F_{2}$ 与阻力臂 $l_{2}$ 的乘积,即 $F_{1}l_{1}=F_{2}l_{2}$. 这就是杠杆的平衡条件.
(3) 由于杠杆始终在水平位置平衡,所以每个力 $F$ 与对应的力臂 $L$ 的乘积都等于杠杆左侧力与力臂的乘积,而左侧悬挂钩码的数量和位置不变,因此每个力 $F$ 与力臂 $L$ 的乘积都相等,即图丁中每个点与两坐标轴围成的方形面积相等.
(4) 如图戊所示,实验中始终保持杠杆在水平位置平衡,将弹簧测力计由图中 $a$ 位置移至 $b$ 位置时,动力臂变小,而阻力与阻力臂的乘积不变,根据杠杆的平衡条件可知,动力变大,所以测力计示数将变大.
(5) 由于胡萝卜的重心不在其几何中心,所以胡萝卜在水平方向上静止时,萝卜头部的重心到支点的距离小于尾部的重心到支点的距离,则头部的质量大于尾部的质量. 因此,该方案不可行.
查看更多完整答案,请扫码查看

