第39页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
1. (2025·广东广州期中)如图
是脚踏式翻盖垃圾桶的示意图,翻盖的原理是由两个杠杆$AO_{1}B及DCO_{2}$组合而成.桶盖的质量为 400 g,脚踏杆和其他连接杆的质量不计,脚踏杆$AO_{1}= 32cm,O_{1}B= 24cm$,桶盖和连接杆的尺寸如图.由图可知,杠杆$DCO_{2}$是____杠杆.若要把桶盖翻开,脚对踏板 A 处的压力至少为____N.($g$取 10 N/kg)

是脚踏式翻盖垃圾桶的示意图,翻盖的原理是由两个杠杆$AO_{1}B及DCO_{2}$组合而成.桶盖的质量为 400 g,脚踏杆和其他连接杆的质量不计,脚踏杆$AO_{1}= 32cm,O_{1}B= 24cm$,桶盖和连接杆的尺寸如图.由图可知,杠杆$DCO_{2}$是____杠杆.若要把桶盖翻开,脚对踏板 A 处的压力至少为____N.($g$取 10 N/kg)
答案:
费力 21 解析:由题意可得,杠杆 $ DCO_{2} $ 以 $ O_{2} $ 为支点, $ DO_{2} $ 的长为阻力臂,阻力臂长为 35 cm, $ CO_{2} $ 的长为动力臂,动力臂长为 5 cm,此时阻力臂大于动力臂,可知此杠杆为费力杠杆;桶盖的重力 $ G = mg = 0.4 \, \text{kg} \times 10 \, \text{N/kg} = 4 \, \text{N} $,设顶杆对桶盖上 $ C $ 点的作用力为 $ F_{2} $,由杠杆的平衡条件可得 $ G \times DO_{2} = F_{2} \times CO_{2} $ ①;根据力的作用是相互的可知顶杆对 $ B $ 点的压力 $ F_{1} = F_{2} $,在杠杆 $ AO_{1}B $ 中,由杠杆的平衡条件可得 $ F \times AO_{1} = F_{1} \times O_{1}B $ ②,联立①②可得,脚对踏板 $ A $ 处的压力至少为 $ F = \frac{O_{1}B \times DO_{2}}{CO_{2} \times AO_{1}} \times G = \frac{24 \, \text{cm} \times 35 \, \text{cm}}{5 \, \text{cm} \times 32 \, \text{cm}} \times 4 \, \text{N} = 21 \, \text{N} $。
2. 如图 1,工人将重 400 N 的货物推入静止的货柜中(忽略空气阻力).
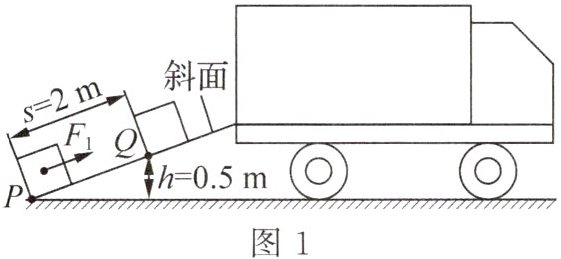
(1) 货物受到沿斜面向上 200 N 的推力$F_{1}$,工人把货物从 P 点推至 Q 点过程中斜面的机械效率为____.
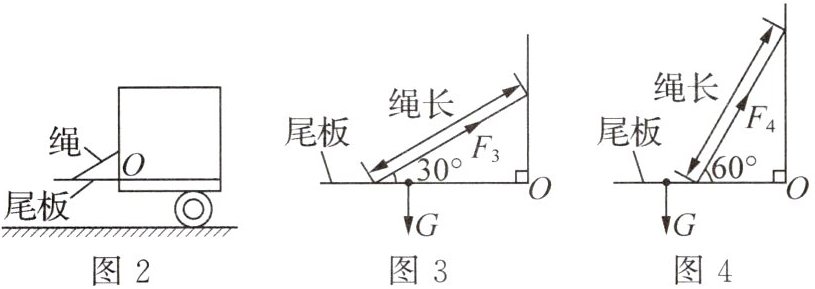
(2) 图 2 中尾板等效成图 3 中以 O 为支点的杠杆,处于水平静止,尾板的重力为 G、受到绳的拉力为$F_{3}$(忽略绳重):
① 在图 3 中画出$F_{3}的力臂l$.
② 绳长一定,绳按图 4 方式悬挂,尾板仍处于水平静止,则此时尾板受到绳的拉力$F_{4}$____(选填“>”“=”或“<”)$F_{3}$,图 4 中该杠杆为____杠杆.
(1) 货物受到沿斜面向上 200 N 的推力$F_{1}$,工人把货物从 P 点推至 Q 点过程中斜面的机械效率为____.
(2) 图 2 中尾板等效成图 3 中以 O 为支点的杠杆,处于水平静止,尾板的重力为 G、受到绳的拉力为$F_{3}$(忽略绳重):
① 在图 3 中画出$F_{3}的力臂l$.
② 绳长一定,绳按图 4 方式悬挂,尾板仍处于水平静止,则此时尾板受到绳的拉力$F_{4}$____(选填“>”“=”或“<”)$F_{3}$,图 4 中该杠杆为____杠杆.
答案:
(1) $ 50\% $
(2) ① 如图所示 ② $ = $ 费力

解析:
(1) 由图 1 可知,货物匀速运动的距离 $ s = 2 \, \text{m} $, $ F_{1} $ 所做的总功 $ W_{\text{总}} = F_{1}s = 200 \, \text{N} \times 2 \, \text{m} = 400 \, \text{J} $,由图 1 可知,货物上升的高度 $ h = 0.5 \, \text{m} $,推力做的有用功 $ W_{\text{有用}} = Gh = 400 \, \text{N} \times 0.5 \, \text{m} = 200 \, \text{J} $;斜面的机械效率 $ \eta = \frac{W_{\text{有用}}}{W_{\text{总}}} \times 100\% = \frac{200 \, \text{J}}{400 \, \text{J}} \times 100\% = 50\% $。
(2) ① 过 $ O $ 点作 $ F_{3} $ 所在直线的垂线段即为力臂 $ l $;② 图 3 和图 4 中,尾板重力没有变,阻力臂没有变,动力臂为直角三角形斜边上的高线,由于两个直角三角形全等,故动力臂也没有变,根据杠杆的平衡条件可知,动力不变,即此时尾板受到绳的拉力 $ F_{4} = F_{3} $;由图 4 可知该杠杆动力臂小于阻力臂,所以为费力杠杆。
(1) $ 50\% $
(2) ① 如图所示 ② $ = $ 费力
解析:
(1) 由图 1 可知,货物匀速运动的距离 $ s = 2 \, \text{m} $, $ F_{1} $ 所做的总功 $ W_{\text{总}} = F_{1}s = 200 \, \text{N} \times 2 \, \text{m} = 400 \, \text{J} $,由图 1 可知,货物上升的高度 $ h = 0.5 \, \text{m} $,推力做的有用功 $ W_{\text{有用}} = Gh = 400 \, \text{N} \times 0.5 \, \text{m} = 200 \, \text{J} $;斜面的机械效率 $ \eta = \frac{W_{\text{有用}}}{W_{\text{总}}} \times 100\% = \frac{200 \, \text{J}}{400 \, \text{J}} \times 100\% = 50\% $。
(2) ① 过 $ O $ 点作 $ F_{3} $ 所在直线的垂线段即为力臂 $ l $;② 图 3 和图 4 中,尾板重力没有变,阻力臂没有变,动力臂为直角三角形斜边上的高线,由于两个直角三角形全等,故动力臂也没有变,根据杠杆的平衡条件可知,动力不变,即此时尾板受到绳的拉力 $ F_{4} = F_{3} $;由图 4 可知该杠杆动力臂小于阻力臂,所以为费力杠杆。
3. 某实验小组制作了如图甲所示的机械手臂模型,并安装在一辆小车上,其结构简图如图乙:工作时安装在小车上的底座可以在水平面内自由旋转,产柱和横臂可以在竖直面内自由旋转,手爪可以抓取不同方向、不同高度的物体.

(1) 图丙为手爪的示意图,按箭头所示方向拉动上方的细线,弯曲件 AOBC 可绕 O 点转动,弯曲件 AOBC 此时为____杠杆,其好处是____.
(2) 同时拉动两根细线手爪就可夹住物体,利用 C 点产生的____力将物体举高.为防止手爪夹物体时给物体造成伤害,可增大 C 点处的____.
(3) 如图丁,电控组件的质量为 400 g,忽略小车、底座、产柱、横臂和手爪的重力,相关参数如图所示(单位:cm),当机械手臂产柱竖直、横臂水平,没有抓取物块时,为防止小车轮子脱离地面,所加配重至少为____N.($g$取 10 N/kg)
(4) 在不增加器材的情况下,要想横臂最终保持水平位置并增加抓取物体的最大重力,可行的方法是____.
(1) 图丙为手爪的示意图,按箭头所示方向拉动上方的细线,弯曲件 AOBC 可绕 O 点转动,弯曲件 AOBC 此时为____杠杆,其好处是____.
(2) 同时拉动两根细线手爪就可夹住物体,利用 C 点产生的____力将物体举高.为防止手爪夹物体时给物体造成伤害,可增大 C 点处的____.
(3) 如图丁,电控组件的质量为 400 g,忽略小车、底座、产柱、横臂和手爪的重力,相关参数如图所示(单位:cm),当机械手臂产柱竖直、横臂水平,没有抓取物块时,为防止小车轮子脱离地面,所加配重至少为____N.($g$取 10 N/kg)
(4) 在不增加器材的情况下,要想横臂最终保持水平位置并增加抓取物体的最大重力,可行的方法是____.
答案:
(1) 费力 省距离
(2) 摩擦 接触面积
(3) 1
(4) 将机械产柱向左转 解析:
(1) 弯曲件 $ AOBC $ 的动力臂小于阻力臂,是费力杠杆,可以省距离。
(2) 同时拉动两根细线手爪就可夹住物体,利用 $ C $ 点产生的摩擦力,物体在摩擦力的作用下不掉落,物体可以跟着手爪一起被举高。为防止手爪在夹物体时给物体造成伤害,可以增大 $ C $ 点处的接触面积,通过增大受力面积,减小压强。
(3) 由题意可知,电控组件受到的重力为 $ G_{\text{组件}} = mg = 0.4 \, \text{kg} \times 10 \, \text{N/kg} = 4 \, \text{N} $,以左轮为支点,所加配重重力为 $ G_{\text{配重}} $,由杠杆的平衡条件可得 $ G_{\text{组件}} L_{1} = G_{\text{配重}} L_{2} $,则 $ 4 \, \text{N} \times 5 \, \text{cm} = G_{\text{配重}} \times 20 \, \text{cm} $,解得 $ G_{\text{配重}} = 1 \, \text{N} $,由此可知为防止小车轮子脱离地面,所加配重至少为 1 N。
(4) 在不增加器材的情况下,可以将机械产柱向左转,使重物重心向左移动,从而减小重物重力的力臂,增加抓取物体的最大重力。
(1) 费力 省距离
(2) 摩擦 接触面积
(3) 1
(4) 将机械产柱向左转 解析:
(1) 弯曲件 $ AOBC $ 的动力臂小于阻力臂,是费力杠杆,可以省距离。
(2) 同时拉动两根细线手爪就可夹住物体,利用 $ C $ 点产生的摩擦力,物体在摩擦力的作用下不掉落,物体可以跟着手爪一起被举高。为防止手爪在夹物体时给物体造成伤害,可以增大 $ C $ 点处的接触面积,通过增大受力面积,减小压强。
(3) 由题意可知,电控组件受到的重力为 $ G_{\text{组件}} = mg = 0.4 \, \text{kg} \times 10 \, \text{N/kg} = 4 \, \text{N} $,以左轮为支点,所加配重重力为 $ G_{\text{配重}} $,由杠杆的平衡条件可得 $ G_{\text{组件}} L_{1} = G_{\text{配重}} L_{2} $,则 $ 4 \, \text{N} \times 5 \, \text{cm} = G_{\text{配重}} \times 20 \, \text{cm} $,解得 $ G_{\text{配重}} = 1 \, \text{N} $,由此可知为防止小车轮子脱离地面,所加配重至少为 1 N。
(4) 在不增加器材的情况下,可以将机械产柱向左转,使重物重心向左移动,从而减小重物重力的力臂,增加抓取物体的最大重力。
查看更多完整答案,请扫码查看

