第2页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
8. 如图所示,一轻质硬棒在$F_{1}$、$F_{2}$两个力的作用下处于静止状态,则硬棒的支点可能在杠杆的( )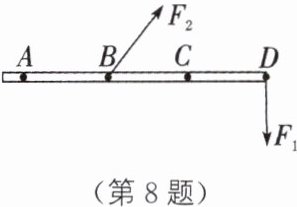
A.A点
B.B点
C.C点
D.D点
A.A点
B.B点
C.C点
D.D点
答案:
A
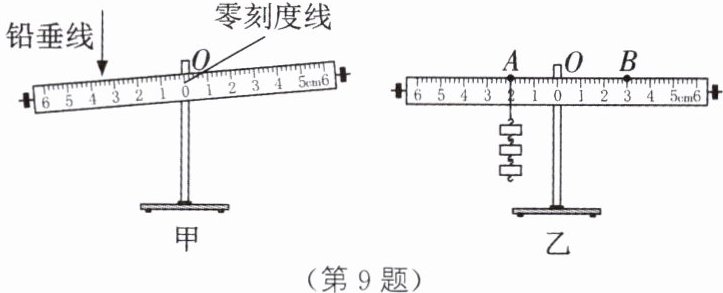
9. (2024·宿迁)在“探究杠杆平衡条件”的实验中,选用的钩码重均为0.5 N。
(1)实验前,杠杆静止在如图甲所示的位置,应将______向______调节,把铅垂线放置于O点,从正前方观察,当零刻度线与铅垂线______(重合/垂直)时,杠杆在水平位置平衡。
(2)如图乙所示,在B点挂上______个钩码,杠杆将在水平位置平衡,再次在其两边各加上1个钩码,杠杆______侧会下降。
(3)多次实验,记录的数据如表所示,可得$F_{1}$、$F_{2}$、$l_{1}$、$l_{2}$之间的关系是______。
|实验次序|动力$F_{1}/N$|动力臂$l_{1}/cm$|阻力$F_{2}/N$|阻力臂$l_{2}/cm$|
|1|1.0|6.0|2.0|3.0|
|2|1.5|4.0|3.0|2.0|
|3|2.0|2.0|4.0|1.0|
(4)下列实验中多次测量的目的与本实验不同的是______。
(1)实验前,杠杆静止在如图甲所示的位置,应将______向______调节,把铅垂线放置于O点,从正前方观察,当零刻度线与铅垂线______(重合/垂直)时,杠杆在水平位置平衡。
(2)如图乙所示,在B点挂上______个钩码,杠杆将在水平位置平衡,再次在其两边各加上1个钩码,杠杆______侧会下降。
(3)多次实验,记录的数据如表所示,可得$F_{1}$、$F_{2}$、$l_{1}$、$l_{2}$之间的关系是______。
|实验次序|动力$F_{1}/N$|动力臂$l_{1}/cm$|阻力$F_{2}/N$|阻力臂$l_{2}/cm$|
|1|1.0|6.0|2.0|3.0|
|2|1.5|4.0|3.0|2.0|
|3|2.0|2.0|4.0|1.0|
(4)下列实验中多次测量的目的与本实验不同的是______。
答案:
(1)平衡螺母 右 重合(2)2 右$ (3)F_1 l_1=F_2 l_2 (4)A$解析:(1)实验前杠杆左低右高,应将杠杆两端的平衡螺母向右调节;从正前方观察,当“0”刻度线与铅垂线重合时,说明杠杆已经在水平位置平衡。(2)设需要在B点挂n个钩码,杠杆将在水平位置平衡,根据杠杆平衡条件可得,3×0.5N×2.00cm=n×0.5N×3.00cm,解得n=2;若再在A、B两点下方各加上一个钩码,则杠杆左侧力与力臂的乘积为(3+1)×0.5N×2.00cm=4N·cm,杠杆右侧力与力臂的乘积为(2+1)×0.5N×3.00cm=4.5N·cm,则杠杆右侧会下降。(3)分析三次实验数据可知,动力与动力臂的乘积等于阻力与阻力臂的乘积,即$F_1 l_1=F_2 l_2。$(4)本实验中,多次测量的目的是避免偶然因素,寻找普遍规律;测量铅笔长度时,多次实验的目的是取平均值减小误差,目的与本次探究不同,A符合题意;探究重力与质量的关系时,多次实验的目的是避免偶然因素,得到重力与质量关系的普遍规律,B不符合题意;探究反射角与入射角的关系时,多次实验的目的是避免偶然因素,得到反射角和入射角关系的普遍规律,C不符合题意。
10. 如图所示,有一根均匀的直铁棒BC长为L、重为420 N,左端放在水平桌面上,A为桌角的位置,$AC= \frac{2}{9}L$,为了使铁棒保持水平,B端所需竖直向上的拉力F至少为______N;若F的方向保持不变,则能使铁棒保持水平的拉力F的范围是______N。

答案:
150 150~210 解析:以A为支点,杠杆水平平衡时,动力臂为AB的长,阻力臂为OA的长,根据杠杆平衡条件可得,F×(L-(2L)/9)=G×(L/2-(2L)/9),则拉力F的大小F=(G×(L/2-(2L)/9))/(L-(2L)/9)=(420N×(5L)/18)/(7L/9)=150N;以C为支点,杠杆水平平衡时,动力臂为BC的长,阻力臂为OC的长,根据杠杆平衡条件可得,F^'×L=G×L/2,则拉力F的大小F^'=(G×L/2)/L=(420N×L/2)/L=210N,即能使铁棒保持水平的拉力F的范围是150~210N。
11. 如图甲所示,AB为轻质杠杆,AC为轻质硬棒且与力传感器相连,图乙是物体M从A点开始向右匀速运动的过程中,力传感器读数大小与时间的关系图像,则物体M的质量大小是______g;已知OA的长度为30 cm,OB足够长,AC能承受的最大弹力大小为15 N,若要杠杆不断,则物体从A点开始运动的时间最长为______s。(g取10 N/kg)

答案:
1000 12.5 解析:由图乙知,M在A点时,传感器受到的压力F=10N,传感器受到的压力的大小等于物体M重力的大小,则M受到的重力G=F=10N,则M的质量m=G/g=10N/10N/kg=1kg=1000g。由图乙知,当M运动到支点O时,传感器受到的压力为0,用时5s,OA=30cm,则M的运动速度v=OA/t=30cm/5s=6cm/s;当M运动到支点O的右侧,传感器受到的最大弹力,即AC所能承受的最大弹力F^'=15N时,设此时M距离支点O的距离为L,根据杠杆平衡条件得F^'×OA=G×L,代入数据有15N×30cm=10N×L,解得L=45cm,则M的运动距离s^'=OA+L=30cm+45cm=75cm,M运动的时间t^'=s^'/v=75cm/6cm/s=12.5s。
12. 如图所示为粗细均匀的轻质杠杆AB,将中点O支起来,在B端放一支蜡烛,在AO的中点C放两支与B端蜡烛完全相同的蜡烛,如果将三支蜡烛同时点燃,它们的燃烧速度相同。那么在蜡烛的燃烧过程中,杠杆AB将( )
A.始终保持平衡
B.不能保持平衡,A端逐渐下降
C.不能保持平衡,B端逐渐下降
D.无法确定
A.始终保持平衡
B.不能保持平衡,A端逐渐下降
C.不能保持平衡,B端逐渐下降
D.无法确定
答案:
A 解析:设一支蜡烛的质量为m,杠杆长度为L,则有2mg×(1/4)L=mg×(1/2)L,杠杆在水平位置平衡;三支蜡烛同时点燃,并且燃烧速度相同,则三支蜡烛因燃烧减少的质量m^'相同,仍有2(m-m^')g×(1/4)L=(m-m^')g×(1/2)L,因此在燃烧过程中杠杆仍保持平衡。
13. (2023·常德)如图所示为锅炉保险阀门的示意图。当阀门受到的蒸汽压力超过其安全值时,阀门就会被拉开。若$OB= 2\ m$,$OA= 0.5\ m$,阀门的底面积$S= 2\ cm^2$,锅炉内气体压强的安全值$p= 6×10^{5}\ Pa$(杠杆的重力、摩擦均不计,大气压强$p_{0}= 1×10^{5}\ Pa$),则B端所挂重物的重力是( )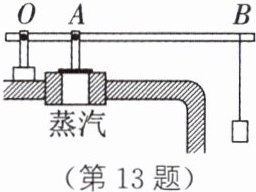
A.20 N
B.25 N
C.30 N
D.120 N
A.20 N
B.25 N
C.30 N
D.120 N
答案:
B 解析:由p=F/S得,气体产生的向上的力$F_1=pS=6×10^5Pa×2×10^(-4)m^2=120N;$大气产生的向下的压力$F_2=p_0 S=1×10^5Pa×2×10^(-4)m^2=20N,$则阀门受到的向上的力$F=F_1-F_2=120N-20N=100N;$根据杠杆的平衡条件可知,F×OA=G×OB,则B端所挂重物的重力G=(F×OA)/OB=(100N×0.5m)/2m=25N。
查看更多完整答案,请扫码查看

