第89页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
- 第101页
- 第102页
- 第103页
- 第104页
- 第105页
- 第106页
- 第107页
- 第108页
- 第109页
- 第110页
- 第111页
- 第112页
- 第113页
- 第114页
- 第115页
- 第116页
- 第117页
- 第118页
- 第119页
- 第120页
- 第121页
- 第122页
- 第123页
- 第124页
- 第125页
- 第126页
- 第127页
- 第128页
- 第129页
- 第130页
- 第131页
- 第132页
在“测量滑轮组的机械效率”的实验中,小明利用如图所示的甲、乙两组滑轮组进行了$4$次测量,并将数据记录在表格中。

基础考法
(1) 在实验中,弹簧测力计应_拉动。
(2) 第$5$次实验中,动滑轮的机械效率为_。
(3)
能力提升
(4)
(5) 小明发现一边拉动弹簧测力计一边读数很不方便,于是他想让弹簧测力计静止读数,他的这种想法显然是错误的,因为他没有考虑到_对滑轮组机械效率的影响,若让弹簧测力计保持静止时读数,则测得的机械效率比实际值要_(选填“偏大”“不变”或“偏小”)。
核心素养
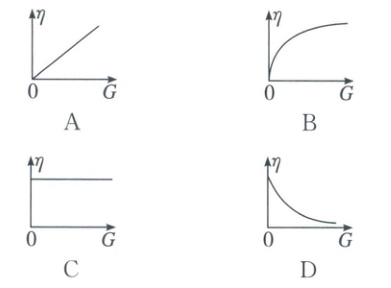
(6)[新考法]若动滑轮的重力不可忽略。现改变物体的重力$G$,则动滑轮的机械效率$\eta$与物体重力$G$的关系可能符合图中的(
基础考法
(1) 在实验中,弹簧测力计应_拉动。
匀速缓慢
(2) 第$5$次实验中,动滑轮的机械效率为_。
75%
(3)
3、5
分析比较_两次实验数据,可以得出:同一滑轮组提升的物重越大,机械效率越高。能力提升
(4)
甲
分析$1$、$2$两次实验数据,可知小明是利用滑轮组_完成的,对比实验数据可以得出:滑轮组的机械效率与_无关。提升物体的高度
(5) 小明发现一边拉动弹簧测力计一边读数很不方便,于是他想让弹簧测力计静止读数,他的这种想法显然是错误的,因为他没有考虑到_对滑轮组机械效率的影响,若让弹簧测力计保持静止时读数,则测得的机械效率比实际值要_(选填“偏大”“不变”或“偏小”)。
核心素养
(6)[新考法]若动滑轮的重力不可忽略。现改变物体的重力$G$,则动滑轮的机械效率$\eta$与物体重力$G$的关系可能符合图中的(
B
)
答案:
(1)匀速缓慢
(2)75%
(3)3、5
(4)甲 提升物体的高度
(5)绳子与滑轮之间的摩擦偏大
(6)B
[解析]
(1)滑轮组运动过程中存在摩擦力,若加速或减速拉动,弹簧测力计的指针会因惯性或力变化而晃动,导致拉力读数波动,难以记录准确值;匀速缓慢拉动时,系统处于动态平衡状态,测力计示数稳定,可减少人为读数误差。
(2)由实验数据表可得,第5次实验中,钩码重力$G = 6N$,钩码上升的高度$h = 0.1m$,动力端拉力大小$F = 4N$,动力端伸长距离$s = 0.2m$,所以,利用滑轮组所做的总功$W_{总}=Fs = 4N×0.2m = 0.8J$,利用滑轮组所做的有用功$W_{有}=Gh = 6N×0.1m = 0.6J$,故第5次实验中的机械效率$\eta=\frac{W_{有}}{W_{总}} = \frac{0.6J}{0.8J} = 75\%$。
(3)根据控制变量法,要探究同一滑轮组机械效率与物重的关系,需使滑轮组的绕线方式、物体上升高度等都相同,只改变物体的重力,观察滑轮组机械效率的变化,根据以上需要,3、5两次实验符合要求。
(4)由1、2两次实验数据可知,动力端伸长的距离$s$与钩码上升高度$h$之间的比值均为$n = 3$,这与甲图所示滑轮组中承担物重的绳子段数$n' = 3$相符,由此可知,1、2两次实验数据,小明是利用滑轮组甲完成的。1、2两次实验中,用同一滑轮组提升相等重力的重物,提升不同的高度(自由端移动不同的距离),结果机械效率相等,说明滑轮组的机械效率与提升物体的高度(自由端移动的距离)无关。
(5)当弹簧测力计静止时读数,没有考虑到绳子与滑轮之间的摩擦对滑轮组机械效率的影响,使得拉力测量值偏小,当物体上升相同高度时,绳端移动的距离也相同,故滑轮组做的有用功相同,但测量出的总功偏小,导致测量的机械效率偏大。
(6)动滑轮的重力不可忽略,则克服动滑轮的重以及绳与滑轮间的摩擦所做的功为额外功,从摩擦角度考虑,随着物体重力的增加,滑轮与绳子间的摩擦会一定程度增大。同时,物重增大,有用功逐渐增大,有用功占总功的比值在增大,所以机械效率逐渐增大;但由于摩擦也在增大,故机械效率与物体重力的关系并不成正比,故B符合题意。
(1)匀速缓慢
(2)75%
(3)3、5
(4)甲 提升物体的高度
(5)绳子与滑轮之间的摩擦偏大
(6)B
[解析]
(1)滑轮组运动过程中存在摩擦力,若加速或减速拉动,弹簧测力计的指针会因惯性或力变化而晃动,导致拉力读数波动,难以记录准确值;匀速缓慢拉动时,系统处于动态平衡状态,测力计示数稳定,可减少人为读数误差。
(2)由实验数据表可得,第5次实验中,钩码重力$G = 6N$,钩码上升的高度$h = 0.1m$,动力端拉力大小$F = 4N$,动力端伸长距离$s = 0.2m$,所以,利用滑轮组所做的总功$W_{总}=Fs = 4N×0.2m = 0.8J$,利用滑轮组所做的有用功$W_{有}=Gh = 6N×0.1m = 0.6J$,故第5次实验中的机械效率$\eta=\frac{W_{有}}{W_{总}} = \frac{0.6J}{0.8J} = 75\%$。
(3)根据控制变量法,要探究同一滑轮组机械效率与物重的关系,需使滑轮组的绕线方式、物体上升高度等都相同,只改变物体的重力,观察滑轮组机械效率的变化,根据以上需要,3、5两次实验符合要求。
(4)由1、2两次实验数据可知,动力端伸长的距离$s$与钩码上升高度$h$之间的比值均为$n = 3$,这与甲图所示滑轮组中承担物重的绳子段数$n' = 3$相符,由此可知,1、2两次实验数据,小明是利用滑轮组甲完成的。1、2两次实验中,用同一滑轮组提升相等重力的重物,提升不同的高度(自由端移动不同的距离),结果机械效率相等,说明滑轮组的机械效率与提升物体的高度(自由端移动的距离)无关。
(5)当弹簧测力计静止时读数,没有考虑到绳子与滑轮之间的摩擦对滑轮组机械效率的影响,使得拉力测量值偏小,当物体上升相同高度时,绳端移动的距离也相同,故滑轮组做的有用功相同,但测量出的总功偏小,导致测量的机械效率偏大。
(6)动滑轮的重力不可忽略,则克服动滑轮的重以及绳与滑轮间的摩擦所做的功为额外功,从摩擦角度考虑,随着物体重力的增加,滑轮与绳子间的摩擦会一定程度增大。同时,物重增大,有用功逐渐增大,有用功占总功的比值在增大,所以机械效率逐渐增大;但由于摩擦也在增大,故机械效率与物体重力的关系并不成正比,故B符合题意。
1. (2025·安徽)图示为某工人利用一滑轮提升物体的示意图。若该工人将质量为$40kg$的物体沿竖直方向匀速提升$3m$,此过程中滑轮的机械效率为$80\%$,$g$取$10N/kg$。求:
(1)物体受到的重力大小。
(2)工人所做的有用功。
(3)工人所做的总功。

(1)物体受到的重力大小。
(2)工人所做的有用功。
(3)工人所做的总功。
答案:
1.解:
(1)物体受到的重力大小$G = mg = 40kg×10N/kg = 400N$。
(2)工人所做的有用功$W_{有}=Gh = 400N×3m = 1200J$。
(3)根据机械效率$\eta=\frac{W_{有}}{W_{总}}×100\%$,可得工人所做的总功$W_{总}=\frac{W_{有}}{\eta} = \frac{1200J}{80\%} = 1500J$。
(1)物体受到的重力大小$G = mg = 40kg×10N/kg = 400N$。
(2)工人所做的有用功$W_{有}=Gh = 400N×3m = 1200J$。
(3)根据机械效率$\eta=\frac{W_{有}}{W_{总}}×100\%$,可得工人所做的总功$W_{总}=\frac{W_{有}}{\eta} = \frac{1200J}{80\%} = 1500J$。
查看更多完整答案,请扫码查看

