第42页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
1. 杠杆:在力的作用下能绕
固定点
转动的硬棒。
答案:
1. 固定点
2. 杠杆的五要素:支点($O$)、动力($F_{1}$)、阻力($F_{2}$)、动力臂($L_{1}$)、阻力臂($L_{2}$)。动力和阻力具有力的大小、方向、作用点三要素,动力臂(阻力臂)是
支点
到动力(阻力)的作用线
的距离。
答案:
2. 支点 作用线
3. 杠杆的平衡条件:
动力×动力臂=阻力×阻力臂
,可以写成$F_1L_1 = F_2L_2$
。
答案:
3. 动力×动力臂=阻力×阻力臂 $F_1L_1 = F_2L_2$
4. 杠杆的分类
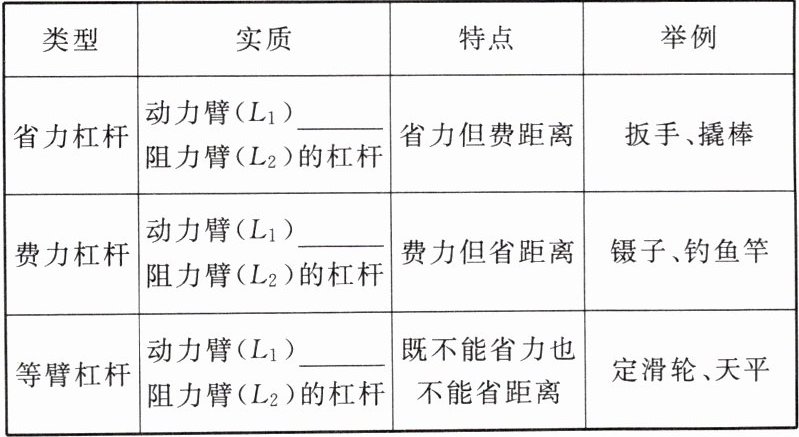
答案:
4. 大于 小于 等于

答案:
$G + G_{动}$;$\frac{G_{总}}{n}$;$nh$
1. 定滑轮:
定滑轮的实质是
定滑轮的实质是
等臂杠杆
,特点是不能省力但能改变拉力的方向。不考虑摩擦和绳重时(理想条件):$F = G_{物}$。
答案:
1.等臂杠杆
2. 动滑轮:
动滑轮的实质是
不考虑绳重、动滑轮重和摩擦时(理想条件):$F = \dfrac{1}{2}G_{物}$。
若不考虑摩擦和绳重,但要考虑动滑轮重时:$F = \dfrac{1}{2}(G_{物} + G_{动})$。
动滑轮的实质是
动力臂等于两倍阻力臂的省力杠杆
,特点是能省力但费距离、不能改变拉力的方向。不考虑绳重、动滑轮重和摩擦时(理想条件):$F = \dfrac{1}{2}G_{物}$。
若不考虑摩擦和绳重,但要考虑动滑轮重时:$F = \dfrac{1}{2}(G_{物} + G_{动})$。
答案:
2.动力臂等于两倍阻力臂的省力杠杆
3. 滑轮组:
定滑轮和动滑轮的组合装置。特点是既能
若不考虑绳重、动滑轮重和摩擦时,自由端的拉力和物重的关系:$F =$
若不考虑摩擦和绳重,但要考虑动滑轮重时,自由端的拉力和物重的关系:$F =$
定滑轮和动滑轮的组合装置。特点是既能
省力
也能改变拉力的方向
。若不考虑绳重、动滑轮重和摩擦时,自由端的拉力和物重的关系:$F =$
$\frac{1}{n}G_{物}$
($n$为分担物重的绳子股数)。若不考虑摩擦和绳重,但要考虑动滑轮重时,自由端的拉力和物重的关系:$F =$
$\frac{1}{n}(G_{物}+G_{动})$
。
答案:
3.省力 拉力的方向 $\frac{1}{n}G_{物}$ $\frac{1}{n}(G_{物}+G_{动})$
$\frac{1}{n}G_{物}$ $\frac{1}{n}(G_{物}+G_{动})$
3.省力 拉力的方向
$\frac{1}{n}G_{物}$ $\frac{1}{n}(G_{物}+G_{动})$ 查看更多完整答案,请扫码查看

