1. 当杠杆在动力和阻力的作用下
静止
时,我们就说杠杆处于平衡状态.
答案:
静止
2. 杠杆的平衡条件是
动力×动力臂=阻力×阻力臂
,用字母表示为$F_{1}l_{1}=F_{2}l_{2}$
.
答案:
动力×动力臂=阻力×阻力臂 $F_{1}l_{1}=F_{2}l_{2}$
3. 杠杆的平衡条件也称
杠杆原理
,最早是由古希腊学者阿基米德
总结出来的.
答案:
杠杆原理 阿基米德
1. (2024·扬州期中)如图甲所示,爸爸和孩子玩跷跷板,若要使跷跷板在水平位置平衡,则爸爸应该适当往
左
移动. 图乙为在水平位置平衡的简化图,不计杠杆自重,若小孩的质量为18kg,则爸爸的质量为72
kg.
答案:
左 72
2. 某实验小组在“探究杠杆的平衡条件”的实验中所用的实验器材有刻度均匀的杠杆、支架、弹簧测力计、刻度尺、细线和重力相同的0.5N重的钩码若干个.
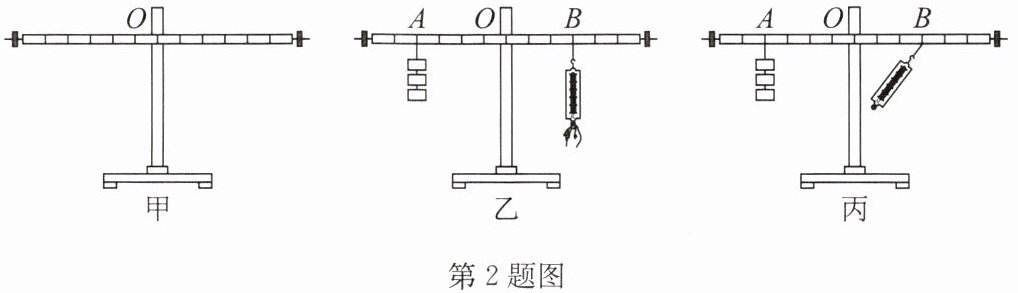
(1)把组装好的杠杆放在水平位置如图甲所示,松手后发现杠杆沿顺时针方向偏转,此时杠杆处于
(2)如图乙所示,在A点处挂3个钩码,在B点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡时力臂就在杠杆上,此时弹簧测力计的拉力为
(3)如图丙所示,斜拉弹簧测力计并使杠杆保持在水平方向静止. 此过程中,弹簧测力计拉力的力臂
(4)小明同学完成如图乙所示的一次操作后,得出了“动力×动力臂= 阻力×阻力臂”的结论. 小勇同学认为他的结论不一定科学,理由是
(1)把组装好的杠杆放在水平位置如图甲所示,松手后发现杠杆沿顺时针方向偏转,此时杠杆处于
非平衡
状态. 为使杠杆在水平位置平衡,应将杠杆右端的平衡螺母向左
调节.(2)如图乙所示,在A点处挂3个钩码,在B点用弹簧测力计竖直向下拉杠杆,使其在水平位置平衡时力臂就在杠杆上,此时弹簧测力计的拉力为
2
N;若在第(1)小题所描述的情形中未调节平衡螺母而直接开展上述实验,弹簧测力计的拉力会变小
.(3)如图丙所示,斜拉弹簧测力计并使杠杆保持在水平方向静止. 此过程中,弹簧测力计拉力的力臂
变小
,拉力的大小变大
. (均选填“变大”“变小”或“不变”)(4)小明同学完成如图乙所示的一次操作后,得出了“动力×动力臂= 阻力×阻力臂”的结论. 小勇同学认为他的结论不一定科学,理由是
只进行一次实验就得出实验结论,实验结论具有偶然性
.
答案:
(1)非平衡 左
(2)2 变小
(3)变小 变大
(4)只进行一次实验就得出实验结论,实验结论具有偶然性
(1)非平衡 左
(2)2 变小
(3)变小 变大
(4)只进行一次实验就得出实验结论,实验结论具有偶然性
查看更多完整答案,请扫码查看

