第63页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
9.(2024.安徽六安期末)在水平地面上,用一个10N 的水平推力将重100N的行李箱沿直线向前推动了5m,撤去推力后,行李箱由于惯性又前进了1m,则推力所做的功为 ( )
A.50J
B.500J
C.60J
D.600J
A.50J
B.500J
C.60J
D.600J
答案:
A
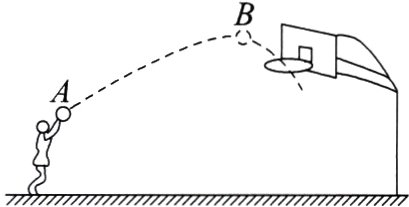
10.小明打篮球时,将篮球投向篮筐,篮球在空中的运动轨迹如图所示,已知篮筐距地垂直高度为3.05m,篮球重约6N。篮球从A处离手后在空中运动至B处的过程中,克服重力做的功约为 ( )
A.2J
B.25J
C.10J
D.20J
A.2J
B.25J
C.10J
D.20J
答案:
C
11.(2024.安徽合肥庐阳区模拟)如图所示,一个重5N的物体被F = 25N的水平力压在竖直墙面上匀速下滑20cm,则匀速下滑的过程中压力F做的功为______J。

答案:
0
12.如图所示,用弹簧测力计沿粗糙斜面匀速向上拉动木块。已知木块所受的重力是10N,沿斜面向上的拉力如图中弹簧测力计所示。在整个过程中,木块沿斜面向上运动了40cm,木块沿竖直方向上升了20cm。求:
(1)拉力做的功;
(2)木块克服重力做的功。

(1)拉力做的功;
(2)木块克服重力做的功。
答案:
解:
(1)由题图知,弹簧测力计的示数为6N,木块沿斜面运动的距离
s=40cm=0.4m
拉力做的功W=Fs=6N×0.4m=2.4J
(2)木块上升的高度h=20cm=0.2m 木块克服重力做的功
W'=Gh=10N×0.2m=2J
(1)由题图知,弹簧测力计的示数为6N,木块沿斜面运动的距离
s=40cm=0.4m
拉力做的功W=Fs=6N×0.4m=2.4J
(2)木块上升的高度h=20cm=0.2m 木块克服重力做的功
W'=Gh=10N×0.2m=2J
13.(2024.四川内江中考)在某届机器人与人工智能国际会议中,图甲为某款静止在水平地面上的智能机器人,重400N。它在某次引领接待工作中,沿水平直线匀速运动,受到的阻力为机器人自重的0.02,运动路程s随时间t变化的图像如图乙所示。求:
(1)静止时,地面对智能机器人的支持力大小;
(2)在0~4s内,动力对机器人做的功。

(1)静止时,地面对智能机器人的支持力大小;
(2)在0~4s内,动力对机器人做的功。
答案:
解:
(1)机器人静止,在竖直方向上受到的是平衡力F支=G=400N
(2)由题图乙可知,0~4s内机器人沿动力方向运动的距离s=2m
机器人匀速运动,则
F=f=0.02G=0.02×400N=8N
动力做功W=Fs=8N×2m=16J
(1)机器人静止,在竖直方向上受到的是平衡力F支=G=400N
(2)由题图乙可知,0~4s内机器人沿动力方向运动的距离s=2m
机器人匀速运动,则
F=f=0.02G=0.02×400N=8N
动力做功W=Fs=8N×2m=16J
14.用弹簧测力计将静止在水平桌面上的钩码竖直向上缓慢提起的过程如图甲所示,弹簧测力计的示数F与零刻度线上升高度h之间的关系如图乙所示。当弹簧测力计的示数为1.6N时,钩码受到的合力大小为______N。从开始提升到h = 30cm的过程中,弹簧测力计的拉力对钩码做的功为________J。

答案:
0 0.8
查看更多完整答案,请扫码查看

