第17页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
1. 我们学习过的简单机械有哪些?使用这些简单机械的目的是什么?
答案:
杠杆:省力杠杆费距离,费力杠杆省距离 定滑轮:改变施力的方向 动滑轮:能省力 滑轮组:能省力和改变力的方向
2. 了解简单机械的发展史,调查我国古代生产、生活中曾利用过的简单机械,并列举几例。
答案:
桔槔 筒车 杆秤
3. 机械可以组合使用,发挥不同机械的优点。各种机械组合时,
不可能
(可能/不可能)同时省力又省距离,即不可能省功
;机械组合越复杂,机械效率往往越低
。
答案:
不可能 不可能省功 越低
4. 如图11-9-1所示是我国仿照人类手臂设计的“天宫”空间站的机械臂,可以实现较大范围的抓取等操作。下列工具使用时与机械臂属于同类型杠杆的是(
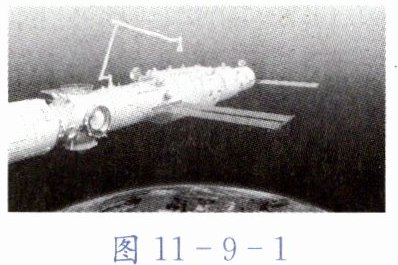
A.夹起食物的筷子
B.拔钉子的羊角锤
C.剪铁丝的钢丝钳
D.起瓶盖的开瓶扳手
A
)。A.夹起食物的筷子
B.拔钉子的羊角锤
C.剪铁丝的钢丝钳
D.起瓶盖的开瓶扳手
答案:
A
5. 如图11-9-2所示,下列组合机械的相关描述中正确的是(
A
)。
答案:
A
6. 如图11-9-3所示,一根质地不均匀的硬棒,其重心在点O。将硬棒通过绳1悬挂于点A,2、3为两个支架,在绳与两支架的作用下硬棒静止,此时绳与支架均对硬棒有弹力(绳的形变可忽略不计)。下列操作中,仍能使硬棒保持平衡的是(

A.仅撤去支架2
B.仅撤去支架3
C.同时剪断绳1和撤去支架2
D.同时剪断绳1和撤去支架3
A
)。A.仅撤去支架2
B.仅撤去支架3
C.同时剪断绳1和撤去支架2
D.同时剪断绳1和撤去支架3
答案:
A
查看更多完整答案,请扫码查看

