2025年阳光课堂金牌练习册八年级物理上册人教版精编版
注:目前有些书本章节名称可能整理的还不是很完善,但都是按照顺序排列的,请同学们按照顺序仔细查找。练习册 2025年阳光课堂金牌练习册八年级物理上册人教版精编版 答案主要是用来给同学们做完题方便对答案用的,请勿直接抄袭。
第64页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
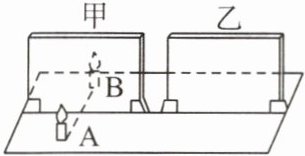
【典型例题3】为完成探究平面镜成像特点的实验,小芳选择了如图所示的实验装置。
(1)小芳用玻璃板代替平面镜的目的是
(2)小芳把点燃的蜡烛A放在玻璃板前,还要在玻璃板的后面放一支外形相同但没有点燃的蜡烛B,小芳应在蜡烛
(3)当把蜡烛靠近玻璃板时,蜡烛在玻璃板中所成像的大小
(4)移去蜡烛B,在其原位置放置一块光屏,光屏上不能承接到蜡烛A的像,说明平面镜所成的像是
(5)实验中,发现在水平桌面上无论怎样移动蜡烛B,都无法与蜡烛A的像完全重合,你认为原因可能是
(6)如图所示,仅将玻璃板由图中甲位置水平向右平移至乙位置时,蜡烛A的成像情况是
A. 蜡烛A成像仍在蜡烛B处
B. 蜡烛A成像在蜡烛B的右侧
C. 蜡烛A无法通过玻璃板成像
(1)小芳用玻璃板代替平面镜的目的是
便于确定像的位置
。(2)小芳把点燃的蜡烛A放在玻璃板前,还要在玻璃板的后面放一支外形相同但没有点燃的蜡烛B,小芳应在蜡烛
A
(选填“A”或“B”)侧观察玻璃板中的像。(3)当把蜡烛靠近玻璃板时,蜡烛在玻璃板中所成像的大小
不变
(选填“变大”“不变”或“变小”)。(4)移去蜡烛B,在其原位置放置一块光屏,光屏上不能承接到蜡烛A的像,说明平面镜所成的像是
虚像
(选填“实像”或“虚像”)。(5)实验中,发现在水平桌面上无论怎样移动蜡烛B,都无法与蜡烛A的像完全重合,你认为原因可能是
玻璃板与桌面不垂直
。(6)如图所示,仅将玻璃板由图中甲位置水平向右平移至乙位置时,蜡烛A的成像情况是
A
(填选项字母)。A. 蜡烛A成像仍在蜡烛B处
B. 蜡烛A成像在蜡烛B的右侧
C. 蜡烛A无法通过玻璃板成像
答案:
答案
(1)便于确定像的位置
(2)A
(3)不变
(4)虚像
(5)玻璃板与桌面不垂直
(6)A
关键点拨 此类试题主要考查探究光反射时的规律、探究平面镜成像的特点、探究光折射时的特点等。解题方法:
(1)根据实验目的和要记录的实验数据选择实验器材;
(2)要得出普遍规律需进行多次实验;
(3)利用归纳法分析实验数据、现象,得出结论。
(1)便于确定像的位置
(2)A
(3)不变
(4)虚像
(5)玻璃板与桌面不垂直
(6)A
关键点拨 此类试题主要考查探究光反射时的规律、探究平面镜成像的特点、探究光折射时的特点等。解题方法:
(1)根据实验目的和要记录的实验数据选择实验器材;
(2)要得出普遍规律需进行多次实验;
(3)利用归纳法分析实验数据、现象,得出结论。
阅读短文,回答文后问题。
机器人的“眼睛”
很多机器人为了“看见”周围的物体,需要有自己的“眼睛”,例如家庭中的扫地机器人,工作时就要能探知前方的家具、墙壁等障碍物。红外传感器就是一种机器人的“眼睛”,其工作原理如图所示,红外传感器上的红外发射器向前方发射一束红外线,碰到障碍物后向各个方向反射,其中一束红外线通过接收透镜中心,照射到红外检测器上的某一位置,该位置偏离透镜主光轴的距离称为偏移值。如果检测器到透镜的距离为f,红外发射器中心线与接收透镜主光轴之间的距离为d,当偏移值为l时,根据数学关系,可计算出红外传感器到障碍物的距离D= $\frac{f(l+d)}{l}$。

(1)红外线属于
(2)红外线碰到障碍物时发生
(3)一个红外传感器的检测器到透镜的距离为10cm,红外发射器中心线与接收透镜光轴之间的距离为20cm,当偏移值为2cm时,红外传感器到障碍物的距离为
(4)若偏移值更大一些,则红外传感器到障碍物的距离更
(5)某型号扫地机器人呈圆盘形,圆盘的直径是30cm,工作时的行走速度约为3m/min,要清扫一个长4.5m、宽3.3m的空房间,它沿3.3m的宽边从一侧走到另一侧需要
机器人的“眼睛”
很多机器人为了“看见”周围的物体,需要有自己的“眼睛”,例如家庭中的扫地机器人,工作时就要能探知前方的家具、墙壁等障碍物。红外传感器就是一种机器人的“眼睛”,其工作原理如图所示,红外传感器上的红外发射器向前方发射一束红外线,碰到障碍物后向各个方向反射,其中一束红外线通过接收透镜中心,照射到红外检测器上的某一位置,该位置偏离透镜主光轴的距离称为偏移值。如果检测器到透镜的距离为f,红外发射器中心线与接收透镜主光轴之间的距离为d,当偏移值为l时,根据数学关系,可计算出红外传感器到障碍物的距离D= $\frac{f(l+d)}{l}$。
(1)红外线属于
不可见
(选填“可见”或“不可见”)光。(2)红外线碰到障碍物时发生
漫
反射。(3)一个红外传感器的检测器到透镜的距离为10cm,红外发射器中心线与接收透镜光轴之间的距离为20cm,当偏移值为2cm时,红外传感器到障碍物的距离为
110
cm。(4)若偏移值更大一些,则红外传感器到障碍物的距离更
小
。(5)某型号扫地机器人呈圆盘形,圆盘的直径是30cm,工作时的行走速度约为3m/min,要清扫一个长4.5m、宽3.3m的空房间,它沿3.3m的宽边从一侧走到另一侧需要
1
min,要将整个空房间清扫一遍至少需要16.4
min。
答案:
(1)不可见
(2)漫
(3)110
(4)小
(5)1 16.4
(1)不可见
(2)漫
(3)110
(4)小
(5)1 16.4
查看更多完整答案,请扫码查看

