第82页
- 第1页
- 第2页
- 第3页
- 第4页
- 第5页
- 第6页
- 第7页
- 第8页
- 第9页
- 第10页
- 第11页
- 第12页
- 第13页
- 第14页
- 第15页
- 第16页
- 第17页
- 第18页
- 第19页
- 第20页
- 第21页
- 第22页
- 第23页
- 第24页
- 第25页
- 第26页
- 第27页
- 第28页
- 第29页
- 第30页
- 第31页
- 第32页
- 第33页
- 第34页
- 第35页
- 第36页
- 第37页
- 第38页
- 第39页
- 第40页
- 第41页
- 第42页
- 第43页
- 第44页
- 第45页
- 第46页
- 第47页
- 第48页
- 第49页
- 第50页
- 第51页
- 第52页
- 第53页
- 第54页
- 第55页
- 第56页
- 第57页
- 第58页
- 第59页
- 第60页
- 第61页
- 第62页
- 第63页
- 第64页
- 第65页
- 第66页
- 第67页
- 第68页
- 第69页
- 第70页
- 第71页
- 第72页
- 第73页
- 第74页
- 第75页
- 第76页
- 第77页
- 第78页
- 第79页
- 第80页
- 第81页
- 第82页
- 第83页
- 第84页
- 第85页
- 第86页
- 第87页
- 第88页
- 第89页
- 第90页
- 第91页
- 第92页
- 第93页
- 第94页
- 第95页
- 第96页
- 第97页
- 第98页
- 第99页
- 第100页
11. 大鲵和扬子鳄都是我国特有的珍稀动物。图 2 - 2 - 8 表示大鲵和扬子鳄以及它们的卵和肺的结构,据图分析回答下列问题。
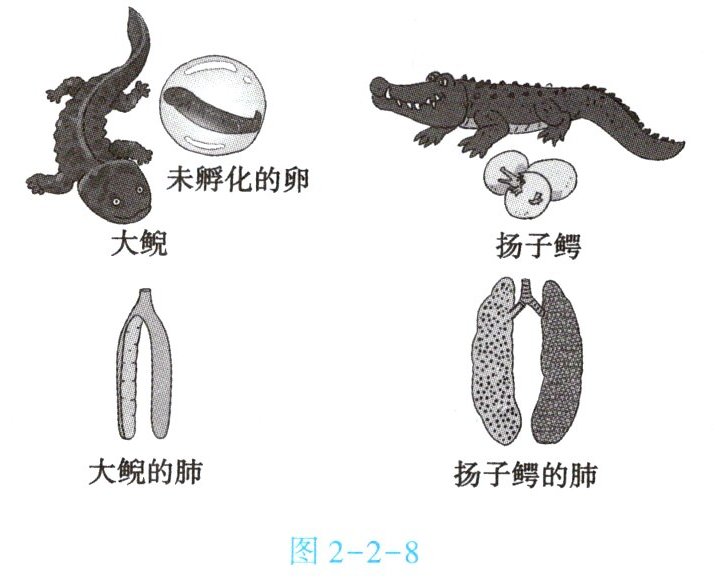
(1) 大鲵和扬子鳄的身体内都有由脊椎骨组成的脊柱,因此都属于______动物。
(2) 大鲵又名娃娃鱼,但它不是真正的鱼,而是现存最大的两栖动物,因为大鲵幼体生活在水中,用______呼吸;成体既可以生活在陆地上,也可在水中游泳,用______呼吸,______也可辅助呼吸。
(3) 扬子鳄是水陆两栖生活,但却属于______动物。因为扬子鳄的体表覆盖角质的鳞片,可以减少体内______的蒸发;用肺呼吸;在陆地上产卵,卵表面有坚韧的______。
(4) 对比图中大鲵和扬子鳄肺的结构,可以看出,______的肺结构简单,______的肺结构复杂,肺内分隔成许多蜂窝状的小室,大大增加了气体交换的面积。
(5) 青蛙、蟾蜍、龟、蝾螈这四种动物也都既可以在水中游泳,也可以在陆地生活,其中与扬子鳄属于同一个动物类群的是______。
(1) 大鲵和扬子鳄的身体内都有由脊椎骨组成的脊柱,因此都属于______动物。
(2) 大鲵又名娃娃鱼,但它不是真正的鱼,而是现存最大的两栖动物,因为大鲵幼体生活在水中,用______呼吸;成体既可以生活在陆地上,也可在水中游泳,用______呼吸,______也可辅助呼吸。
(3) 扬子鳄是水陆两栖生活,但却属于______动物。因为扬子鳄的体表覆盖角质的鳞片,可以减少体内______的蒸发;用肺呼吸;在陆地上产卵,卵表面有坚韧的______。
(4) 对比图中大鲵和扬子鳄肺的结构,可以看出,______的肺结构简单,______的肺结构复杂,肺内分隔成许多蜂窝状的小室,大大增加了气体交换的面积。
(5) 青蛙、蟾蜍、龟、蝾螈这四种动物也都既可以在水中游泳,也可以在陆地生活,其中与扬子鳄属于同一个动物类群的是______。
答案:
(1)脊椎
(2)鳃 肺 皮肤
(3)爬行 水分 卵壳
(4)大鲵 扬子鳄
(5)龟
(1)脊椎
(2)鳃 肺 皮肤
(3)爬行 水分 卵壳
(4)大鲵 扬子鳄
(5)龟
12. 如图 2 - 2 - 9 所示,北京理工大学的研究人员模仿青蛙开发了一款名为机器蛙的水陆两栖机器人。机器蛙在地面时通过双腿摆动,配合万向轮实现向前运动,最大移动速度可达 1 米/秒;在水中时利用双腿摆动,驱动后方尾鳍实现运动,最大水下游动速度可达 0.4 米/秒。
(1) 机器蛙模仿了青蛙具有______的运动方式以适应水陆环境。
(2) 机器蛙头部与青蛙形状相似,可减小外界______;腿鳍结构末端添加的尾鳍模仿了青蛙趾间有______的特点,从而实现水下运动;运动时的动力由头部的两个电机提供,这些电机类似于青蛙后肢发达的______;头部的控制系统能接受命令并控制决策。这些特点使得机器
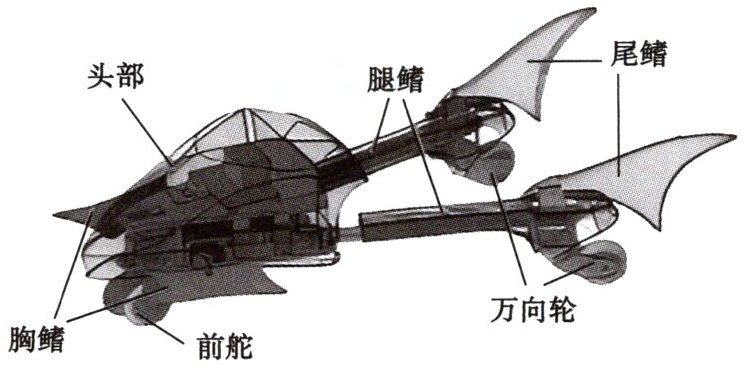
蛙能轻松实现水陆运动、数据采集的功能,有利于地形探测、资源探查、灾害搜索、科学调研等。
(3) 机器蛙也存在一定的不足,如果你是研究团队的一员,说说你将在哪些方面对模型进行改进完善:______。
(1) 机器蛙模仿了青蛙具有______的运动方式以适应水陆环境。
(2) 机器蛙头部与青蛙形状相似,可减小外界______;腿鳍结构末端添加的尾鳍模仿了青蛙趾间有______的特点,从而实现水下运动;运动时的动力由头部的两个电机提供,这些电机类似于青蛙后肢发达的______;头部的控制系统能接受命令并控制决策。这些特点使得机器
蛙能轻松实现水陆运动、数据采集的功能,有利于地形探测、资源探查、灾害搜索、科学调研等。
(3) 机器蛙也存在一定的不足,如果你是研究团队的一员,说说你将在哪些方面对模型进行改进完善:______。
答案:
(1)跳跃和游泳(或划水)
(2)阻力 蹼 肌肉
(3)身体需扁平,减小阻力;改用更智能的人工控制系统;将腿鳍设计成分节形式,使其运动更灵活;改为用一个电机驱动,避免两个电机驱动两条腿鳍,容易出现腿鳍摆动不对称、重心不稳等(合理即可)
(1)跳跃和游泳(或划水)
(2)阻力 蹼 肌肉
(3)身体需扁平,减小阻力;改用更智能的人工控制系统;将腿鳍设计成分节形式,使其运动更灵活;改为用一个电机驱动,避免两个电机驱动两条腿鳍,容易出现腿鳍摆动不对称、重心不稳等(合理即可)
查看更多完整答案,请扫码查看

