【题目】阅读短文,回答问题。
“无人机”(多功能飞行器)可通过无线电进行操控,其在拍摄调查、无人配送等方面具有广阔的前景。某品牌“无人机”由锂电池供电,采用4个电机带动旋翼转动,对下方空气施力的同时获得升力。该无人机设有一键起降和返航、空中悬停等功能,其携带的摄像机可以进行高清拍摄并实时把信号传到遥控器显示器,下表是该无人机的部分参数:
无人机质量(含摄像机 | 1.5kg | 锂电池额定电压 | 12V |
最大上升速度 | 6m/s | 电动机工作电压 | 10V |
最大水平速度 | 15m/s | 每个电动机最大输出功率 | 50W |
最大上升速度时受到的空气阻力 | 9N | 电动机的能量转化效率 | 95% |
(1)当“无人机”携带摄像机飞行在空中进行拍摄地面图像时,下列说法中错误的是(________)
A.“无人机”升空时,获得升力的施力物体是空气
B.“无人机”中的电动机工作原理是磁场对电流的作用
C.“无人机”在拍摄地面图像时增加悬停高度可以使所成的像变大
D.“无人机”升空过程中所受到的大气压变小
(2)为了保证电动机正常工作,通过电子调速器(简称电调)来控制电动机的电流从而改变电动机的功率,每一个电动机连接一个电调,那么电动机和电调的连接方式是________(选填“串联”或“并联”)。
(3)已知“无人机”上升时受到空气的阻力与上升速度的平方成正比。该“无人机”携带摄像机参与某次火情的勘测时,“无人机”以4m/s的速度从地面匀速竖直升空至100m高处,然后悬停观测(整个过程4个电动机同时工作)。此时,“无人机”上升时受到的空气阻力________N。“无人机”上升过程中电动机消耗的电能为________J。(g=10N/kg)
(4)该“无人机”携带的微型摄像机带有自动拍摄功能,未出现火情时处于待机状态,等到火情来临时产生一定强度的红外线,摄像机将自主启动进入工作状态。小明利用红外探测器设计了一个“模拟自启系统”,如图甲所示。该系统由“自启电路”、“控制电路”等组成。其中电源由“无人机”锂电池提供,R是电阻箱, RP是红外探测器,可视为可变电阻,它的阻值与红外线强度变化的对应关系如下表所示。(E为红外线强度,cd表示其单位)
E/cd | 1 | 2 | 3 | 4 | 6 |
RP/Ω | 18 | 9 | 6 | 4.5 | 3 |
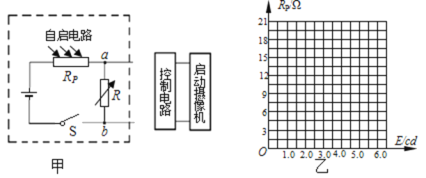
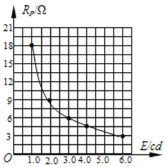
①表中数据,请在图乙坐标中描点做出RP-E 的关系图线
(_____)
②a、b两端电压必须等于或大于9V时,控制电路才能启动摄像机进入工作状态。小明设定红外线强度为4.5cd时启动摄像机工作,电阻箱的阻值至少应调到________Ω。
③为了能使控制电路在红外线强度较弱时就能启动摄像机进入工作状态,可采取的措施:一是________(选填“调高”或“调低”))电阻箱R的电阻值;二是________(选填“调高”或“调低”)开电源的电压值。
【答案】![]() 串联
串联 ![]() 2000
2000 
![]() 调高 调高
调高 调高
【解析】
![]() 、四旋翼无人机,当电机带动旋翼
、四旋翼无人机,当电机带动旋翼![]() 螺旋桨
螺旋桨![]() 转动时,对下方空气施加向下的作用力,根据物体间力的作用是相互的,空气对它施加向上的反作用力
转动时,对下方空气施加向下的作用力,根据物体间力的作用是相互的,空气对它施加向上的反作用力![]() 即为升力
即为升力![]() ,所以获得升力的施力物体是空气,故A正确;
,所以获得升力的施力物体是空气,故A正确;
B、无人机”中的电动机工作原理通电线圈在磁场中受力而转动![]() 或磁场对电流的作用
或磁场对电流的作用![]() ,故B正确;
,故B正确;
C、摄像机的镜头是凸透镜,成倒立缩小的实像,在拍摄地面图象时增加悬停高度,即物距增大,像距变项,所成的像也变小,故C错误;
D、大气压随高度的升高而减小,即“无人机”升空过程中所受到大气压变小,故D正确;故选C;
![]() 由题意知,每一个电动机连接一个电调,通过电子调速器
由题意知,每一个电动机连接一个电调,通过电子调速器![]() 简称电调
简称电调![]() 来控制电动机的电流从而改变电动机的功率,故电动机和电调的连接方式是串联。
来控制电动机的电流从而改变电动机的功率,故电动机和电调的连接方式是串联。
![]() 由表格数据可知,无人机的最大上升速度为
由表格数据可知,无人机的最大上升速度为![]() ,此时受到的空气阻力为9N,
,此时受到的空气阻力为9N,
由题意知,“无人机”上升时受到的空气阻力与上升速度的平方成正比,即:![]() ,
,
所以:![]() ,即:
,即:![]() ,解得:
,解得:![]() 。
。
由于“无人机”以![]() 的速度从地面匀速竖直升空,
的速度从地面匀速竖直升空,
根据力的平衡条件可知,“无人机”获得的升力:![]() ,
,
则升力做的功:![]() ,
,
由![]() 得,“无人机”上升过程中电动机消耗的电能:
得,“无人机”上升过程中电动机消耗的电能:![]() 。
。
![]() 将
将![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() 在坐标纸上描点连线,如图所示:
在坐标纸上描点连线,如图所示:
![]() 表格数据可知,当红外线强度变为原来的几倍,红外探测器
表格数据可知,当红外线强度变为原来的几倍,红外探测器![]() 的阻值变为原来的几分之一,所以,红外探测器
的阻值变为原来的几分之一,所以,红外探测器![]() 的阻值与红外线强度E成反比,
的阻值与红外线强度E成反比,
则有:![]() ,解得:
,解得:![]() ,
,
由题知,启动摄像机工作时,a、b两端的最小电压![]() 即电阻箱的最小电压
即电阻箱的最小电压![]() ,
,
则![]() 两端的电压:
两端的电压:![]() ,
,
电路中的电流:![]() ,
,
由![]() 得,电阻箱的最小阻值:
得,电阻箱的最小阻值:![]() ;
;
![]() 在红外线强度较弱时,红外探测器
在红外线强度较弱时,红外探测器![]() 的阻值较大,其两端的电压将增大,为了保证a、b两端电压必须等于或大于9V不变,可采取的措施:一是调高电阻箱R的电阻值;二是调高电源的电压值。
的阻值较大,其两端的电压将增大,为了保证a、b两端电压必须等于或大于9V不变,可采取的措施:一是调高电阻箱R的电阻值;二是调高电源的电压值。
