【题目】探究杠杆的平衡条件。
(1)实验前 |
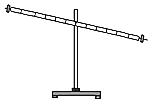
| 杠杆静止在如图所示的位置,要使杠杆在水平位置平衡,应将平衡螺母向______调节。 | |||||||||||||||||||||||
(2)实验时 |
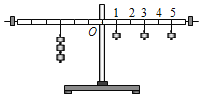
| ①用如图所示的方式悬挂钩码,杠杆也能在水平位置平衡(杠杆上每格等距),但老师却往往提醒大家不要采用这种方式。这主要是因为该种方式(______) A.一个人无法独立操作 B.需要使用太多的钩码 C.无法测量力臂 D.力和力臂数目过多 ②在图中,不改变支点O左侧所挂的三个钩码及其位置,保持右侧第______格的钩码不动,将右侧另外两个钩码改挂到它的下方,杠杆也可平衡。继续实验: | |||||||||||||||||||||||
实验数据:
| |||||||||||||||||||||||||
(3)结论 | 杠杆的平衡条件是:______ | ||||||||||||||||||||||||
(4)交流评估 | ①实验进行三次的目的是______(只有一个选项正确,填写对应字母) a.取平均值减小误差 b.归纳出物理规律 c.使每组数据更准确 ②某同学在第3次实验的基础上,将左右两侧的钩码同时向支点O移动 | ||||||||||||||||||||||||
【答案】左 D 3 ![]() (动力×动力臂=阻力×阻力臂) b 右侧下沉
(动力×动力臂=阻力×阻力臂) b 右侧下沉
【解析】
(1)[1]由图可知,杠杆左端高,右端低,要使杠杆在水平位置平衡,应将平衡螺母向左移动。
(2)①[2]实验中,如图所示的方式悬挂钩码,杠杆平衡时,杠杆的右侧在多个力共同作用的结果,采用这种方式是不妥当的。这主要是因为杠杆的力和力臂数目过多,故选D。
②[3]不改变支点O左侧所挂的三个钩码及其位置,将右侧另外两个钩码改挂到第三个钩码的下方,即右侧的力是三个钩码,根据杠杆平衡的条件得到
3个×3格=3个×n格
n=3
即保持右侧第3格的钩码不动。
(3)[4]由表中数据可知,杠杆的平衡条件是![]() (动力×动力臂=阻力×阻力臂)。
(动力×动力臂=阻力×阻力臂)。
(4)①[5]实验进行三次,可以归纳出物理规律,一次实验获得的数据有偶然性,故选B。
②[6]在第3次实验的基础上,将左右两侧的钩码同时向支点O移动![]() ,杠杆左侧
,杠杆左侧
2.0N×(15cm-5cm)=20N·cm
杠杆右侧
1.5N×(20cm-5cm)=22.5N·cm
左侧力和力臂的乘积小于右侧力和力臂的乘积,杠杆右侧下沉。
